Wrist Double Joint
thingiverse
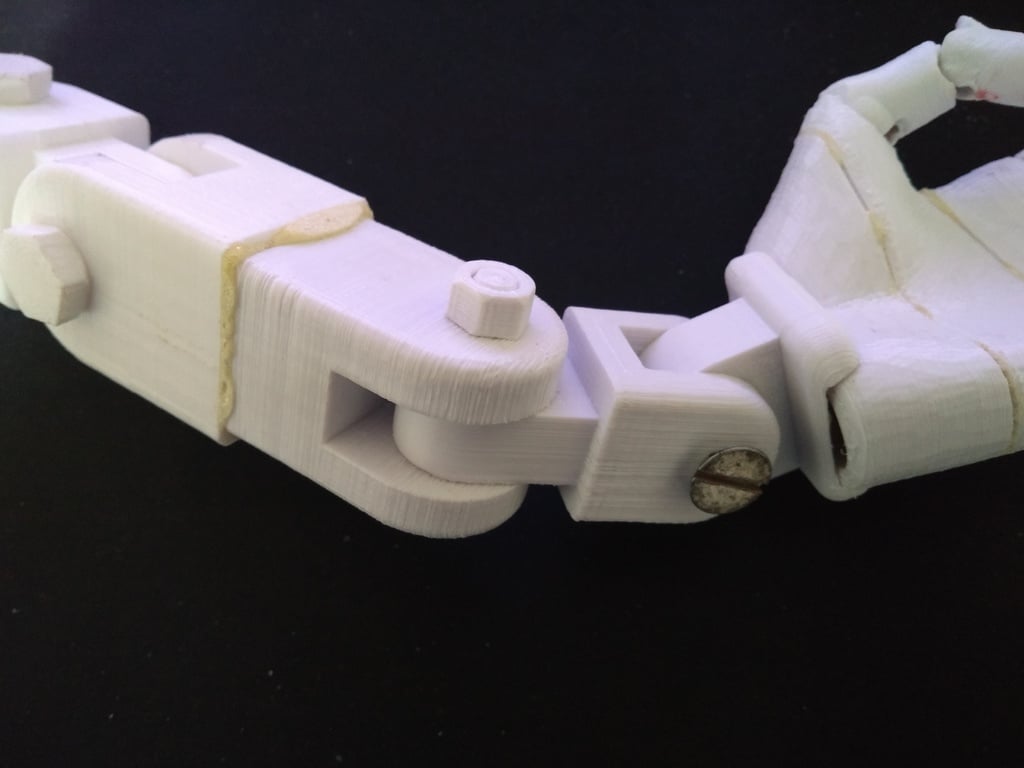
A crucial component in robotics known as a double-revolute joint functions as a wrist joint. It consists of three essential parts: Alpha, Beta, and an adaptor that allows this wrist joint to seamlessly connect with a hand, which is available separately for download. The 'Alpha' wrist part has been designed to fit snugly over the end of 20x20 aluminium extrusion. For those who possess CAD software like Fusion 360, they can easily modify the .STL files of both parts to accommodate any desired specifications. The 3DP nut and bolt in this joint have been adapted from a design shared on thingiverse.com by mike_mattala. However, these components are relatively weak, particularly at such small scales when printed with PLA material. To avoid damage, it is essential not to overtighten the bolts, as seen in the photos where one of the PLA wrist bolts snapped off and had to be replaced with a steel one. A good approach would be to use 35-45% infill at 0.1mm fine resolution for the main parts of this joint, then increase the infill percentage to maximum 100% for the nut and bolt. This is because these tiny components require maximum strength due to their small size and thin design.
With this file you will be able to print Wrist Double Joint with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Wrist Double Joint.