Walking plant hexapod robot
thingiverse
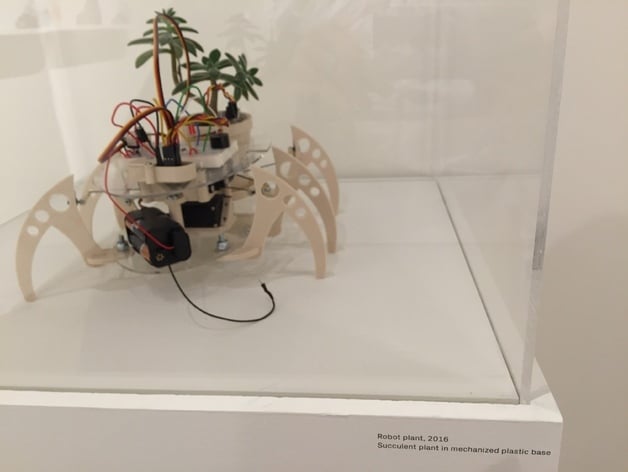
update 5/16/2016 A display of robots is currently on exhibit at the Contemporary Art Museum of St. Louis. This exhibition showcases 3D printed robotics in art, a rewarding class that highlighted key concepts. Visitors are encouraged to build their own museum-class robot. This custom robot was designed for a one-time workshop with high school art students through a program found here: http://camstl.org/programs/youth-teen-programs/nan/ During the workshop, 20 students were divided into 4 groups, each building a walking robot. A moisture sensor is attached to analog port 0 on the Light Blue bean. A Drop box link to the workshop's build instructions and program can be found here: https://www.dropbox.com/sh/85v7aavc3psypyl/AACJ7jt0dUC9zp7bbGm1b40Ba?dl=0 The robots are programmed to move towards light and serve as an extension of the plant itself. They do this by moving towards sunlight and beeping when the moisture level is low, warning users when the plant needs water while keeping it healthy. Key components include a microcontroller, sensors, motors, and a 3D printed body. The program provides a basic understanding of C++ programming as it relates to robotics, learning the biology of plants' needs, and the impact humans have on the environment. This project is ideal for students in 9th grade and higher, covering subjects such as science, math, and STEM. Skills learned include basic C++ programming, plant biology, and using biodegradable filament to produce a large portion of the robot. A full step-by-step build is provided in the link below: https://www.dropbox.com/sh/85v7aavc3psypyl/AACJ7jt0dUC9zp7bbGm1b40Ba?dl=0 Duration: Build time is approximately 3 hours, but a week should be set aside to complete the build and further skills in programming and 3D printing. Preparation includes having a 3D printer, soldering iron, and basic hand tools. The teacher may wish to print most items before the class takes place. The microcontroller can also be swapped for a standard Arduino with minor software changes. References include Makerbot in the classroom: http://pages.makerbot.com/download-makerbot-in-the-classroom.html?utm_source=leaden&utm_medium=website&utm_campaign=makerbot-in-the-classroom-download The micro controller starter guide is available at https://punchthrough.com/bean/guides/getting-started/intro/ Additional projects can be found on my personal website: http://secondrobotics.com/ Rubric & Assessment: Grading of the project can be in stages, 5-10 points each, with a bonus 20 points for those who modify large sections of the code. This includes factors such as whether the robot is able to power on and walk, how fast it can go, if it can step over large objects, and the overall cleanliness of the wiring. Handouts & Assets: Both the code, a brief summary of the class, and step-by-step build instructions are provided in the following link: https://www.dropbox.com/sh/85v7aavc3psypyl/AACJ7jt0dUC9zp7bbGm1b40Ba?dl=0
With this file you will be able to print Walking plant hexapod robot with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Walking plant hexapod robot.