VertiBOT
thingiverse
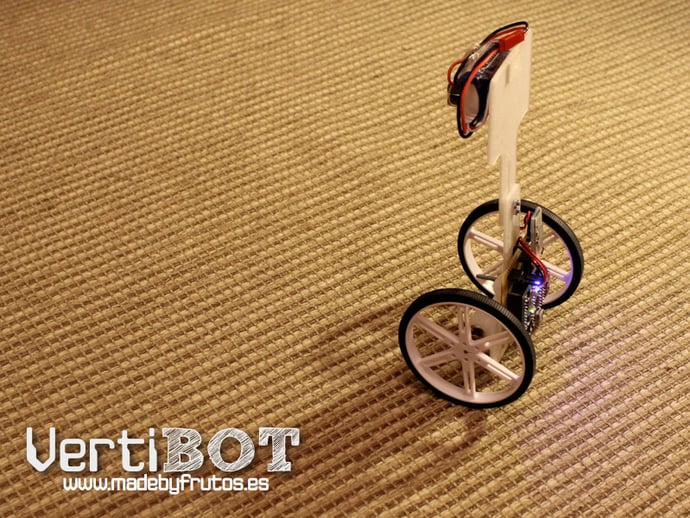
VertiBOT is an educational project that explores sensor fusion using Kalman and complementary filter algorithms and PID control in an unstable system. It's an inverted pendulum platform balanced by two small motors at its base, with the battery on top of the main body and electronics board near the rotation axis. An IMU 6Dof, consisting of an accelerometer and gyro, provides feedback, while an ATmega 328 microcontroller executes a loop every 10 milliseconds. Bluetooth wireless communication is used for tuning and checking signal responses in a Graphical User Interface software. Check out the video at http://youtu.be/A5KtT4GVpx8, and find useful info, schematic, and code at http://wp.me/p22sj0-fT. The project features an ATmega 328 16MHz microcontroller (Arduino nano), a 6Dof IMU with ADXL345 accelerometer and ITG3200 gyroscope, Pololu Qik2sv1 motor driver, Bluetooth modem for wireless communication, a potentiometer for PID tuning parameters, buttons for various tasks such as algorithm change and calibration offsets, voltage regulator MCP1700 and logic converter, Pololu MicroMetal Motors (50:1), and Pololu Wheels 90x10mm.
With this file you will be able to print VertiBOT with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on VertiBOT.