uStepper Robot Arm Wrist Joints
thingiverse
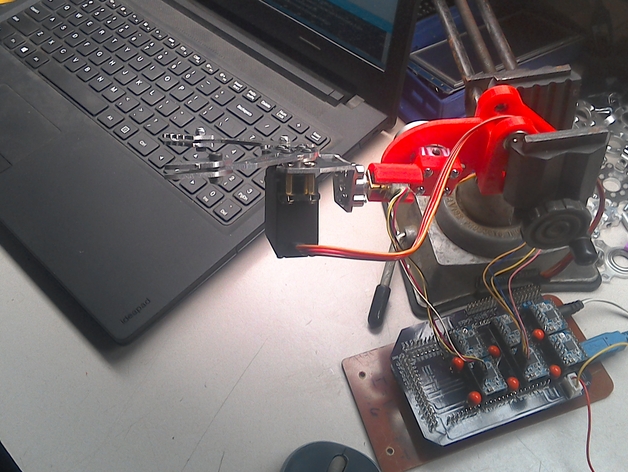
I'm really into the design of the uStepper Robotic Arm so much that I've started building one myself. Unfortunately, my preference for it is hindered by its limited wrist movement. To give the arm some angular wrist movement, I'm using a 28BYJ-48 12V stepper and a micro geared stepper for rotational movement. This is just a prototype at this point, essentially proof of concept, but there's one major downside: the 28BYJ stepper loses its position when power is removed. To improve the design, I plan to look into using some type of gear reduction for angular movement and figure out how to reduce the mass of the end-effector. The 28BYJ stepper or a similar model can be found here: http://www.ebay.com/itm/28BYJ-48-Valve-Gear-Stepper-Motor-DC-12V-4-Phase-Step-Motor-Reduction-Arduino-/172294403078?hash=item281d8bf406:g:q0kAAOSwdzVXowG~ For the micro geared stepper, I'm using this model: http://www.dx.com/p/15mm-2-phase-4-line-micro-15by-dc-5v-stepper-gear-box-motor-355421#.V_CnF-ArK00. The hub adapters are from servocity.com and come in 5mm and 3mm sizes: https://www.servocity.com/770-set-screw-hubs. Keep in mind that this is a work-in-progress prototype, so any suggestions will be taken into consideration and greatly appreciated. Printer Settings Printer: Dup I3 Rafts: No Supports: No Resolution: .2 mm Infill: 75% Notes: PETG
With this file you will be able to print uStepper Robot Arm Wrist Joints with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on uStepper Robot Arm Wrist Joints.