Two Jaw Self Centering Parallel Gripper
thingiverse
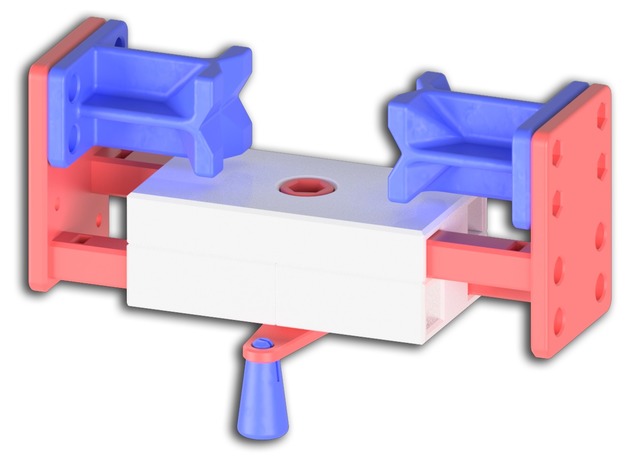
Two Jaw Self Centering Parallel Gripper A clever mechanism utilizes two racks and a pinion to open and close the gripper by rotating a handle connected to the pinion. Two additional sets of guides ensure that the tooling plates remain stationary, preventing rotation. A full 180 degrees of rotation opens the grippers a generous 2.5 inches. Instructions: 1. Print out all the necessary parts. 2. Insert the swivel into the handle and secure it in place with superglue if needed. 3. Place the gear assembly and the racks into the gripper base, positioning them so they are opposite each other and flush with the outside of the base. 4. Using the dovetail slots, slide the guide blocks onto the gripper base until they connect with the detent and lock in place. 5. Slide the two guides into the guide blocks. 6. Mount the tooling plates on the ends of the racks and guides using four M3 x 10mm long socket head cap screws and nuts. 7. Mount the tooling onto the tooling plates using eight M3 x 6mm long socket head cap screws and nuts. Required Fasteners: To mount the tooling plates to the guides, use (4X) M3 x 10mm long socket head cap screws and (4X) M3 hex nuts. To mount the tooling to the tooling plates (optional), use (8X) M3 x 6mm long socket head cap screws and (8X) M3 hex nuts. Note: A set of gripper tooling is included, but additional tooling for your specific application can be mounted using the M3 mounting nuts on the tooling plate. The updated version will operate with a standard hobby servo. Watch this video to see it in action: https://youtu.be/8PEgVHpHM8w Print Settings: Printer: MP Select Mini Rafts: No Supports: No
With this file you will be able to print Two Jaw Self Centering Parallel Gripper with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Two Jaw Self Centering Parallel Gripper.