Triple Cycloidal Robot Arm Proto-1
thingiverse
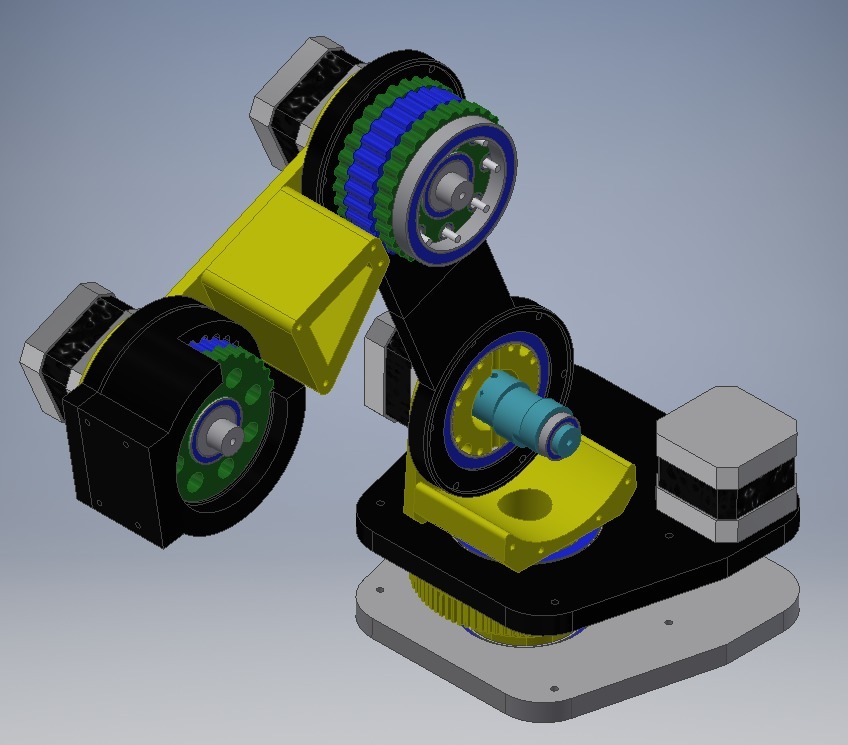
Human: Still a work in progress. Nothing is final yet. A robot arm project, showcased on hackaday.io, is making steady progress. The triple-cycloidal robot arm is an innovative design that requires careful selection of bearings to ensure smooth operation. Two 6809RS bearings are used per joint for the big ones, providing stability and support. For the eccentric cam, six 6704-2RS bearings are installed, along with one 6701-2RS bearing at the end. To complete the joints, twenty-four MR85-2RS bearings are used for internal pins. When searching for bearing suppliers in Australia, consider plaig.com.au and apollobearings.com.au as reliable options.
With this file you will be able to print Triple Cycloidal Robot Arm Proto-1 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Triple Cycloidal Robot Arm Proto-1.