Tevo Tarantula Filament Runout Sensor Enclosure
cults3d
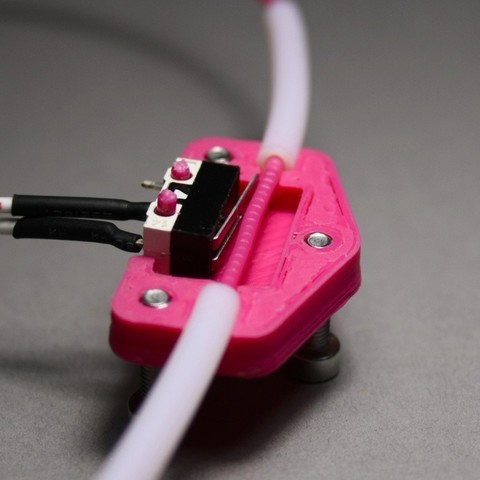
I crafted this for seamless integration with the spare sensor included in the Tevo Tarantula kit. You can opt for small screws (M2) to secure the switch or follow my lead and use 1.75mm filament to attach the switch directly to the enclosure. Simply screw the enclosure together using three M3 x 12mm screws and nuts. I employed short pieces of PTFE tubing on the ends of the enclosure, but this step is entirely optional. Print the filament_runout_enclosure.stl twice after which you may want to smooth out the printed pieces for a snug fit. I utilized the Z+ Port, so set FIL_RUNOUT_PIN in pins_RAMPS.h to 19: #define FIL_RUNOUT_PIN 19 In Configuration.h search for the FILAMENT_RUNOUT_SENSOR define and remove the comment from it. If you prefer to use the default pinout, also invert the logic of the sensor and disable the internal pullup: #define FILAMENT_RUNOUT_SENSOR #if ENABLED(FILAMENT_RUNOUT_SENSOR) #define FIL_RUN_OUT_INVERTING true // set to true to invert the logic of the sensor. //#define ENDSTOPPULLUP_FIL_RUN_OUT // Uncomment to use internal pullup for filament runout pins if the sensor is defined. #define FILAMENT_RUNOUT_SCRIPT "M600" #endif More information about Marlin configuration can be found here. The OpenSCAD file is attached and may be customized via Customizer in case you want to adapt it for a different switch or your specific tolerances.
With this file you will be able to print Tevo Tarantula Filament Runout Sensor Enclosure with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Tevo Tarantula Filament Runout Sensor Enclosure.