TetraROV: low-cost underwater drone
prusaprinters
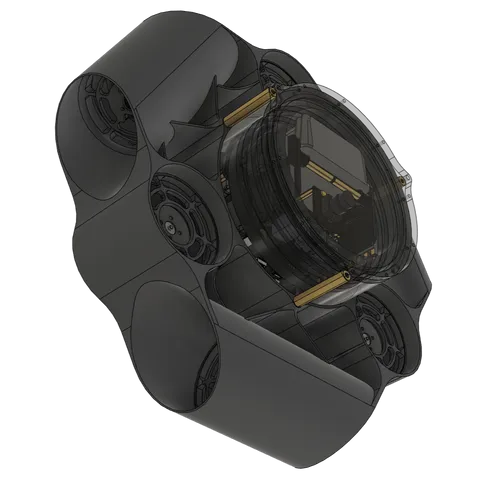
What - TetraROV is a remotely operated underwater vehicle capable of moving in all six degrees of freedom (surge, sway, heave, roll, pitch, and yaw) and is optimized for low-cost manufacturability.Who - The goal of the project is to lower the barrier of entry for researchers, inspection, and maintenance workers to have access to underwater ROVs for their field of work.How - The cost of the vehicle is lowered by reducing the number of parts needed (8 motor -> 6 motor) and leveraging economies of scale (x3 of the same unique frame component). Six Thruster Configuration: This design reduces the number of motors needed to move in all directions and orientations, thus saving on the cost per build. Radially Symmetric Frame: The minimalistic frame design redirects the flow of water around or into the thruster shrouds, making movement and rotation non-turbulent regardless of the direction of travel. Identical Frame Parts: By requiring only one unique part to build the frame, it reduces the cost of manufacturing significantly, be it making only one injection mold to create thousands of frames or simplifying the assembly process. Low Vertical Profile:The total height of the vehicle is equivalent to the height of the thruster, allowing it to travel into and work in tighter spaces underwater. Modular Attachments Points: With no set direction for "front", there are more than three locations where manipulators and sensors can be mounted. On top of that, since it has control over all degrees of freedom, there is no need to worry about balancing the buoyancy of the vehicle. My Socials -contact me at - https://www.linkedin.com/in/ming-jy/visit my portfolio at - https://www.mingjinyong.com/
With this file you will be able to print TetraROV: low-cost underwater drone with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on TetraROV: low-cost underwater drone.