Stewart Platform v2.1
thingiverse
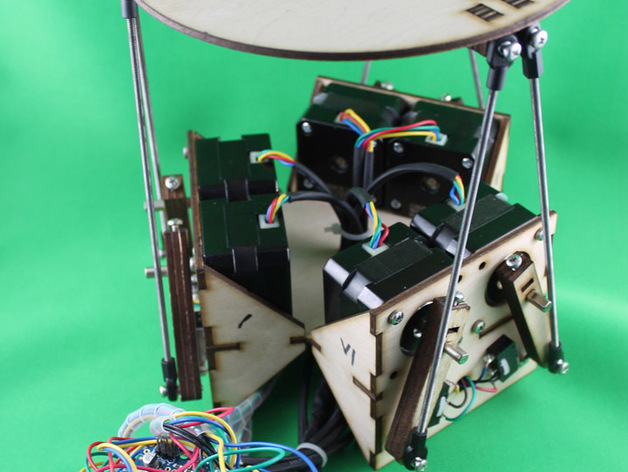
On Hackaday, Stewart Platforms are utilized in flight simulators and robotic surgery but are usually seen only in universities due to custom machine-building requirements for specific applications. A free open hardware design aims to make life easier for engineers worldwide. For those who don't want self-assembly, visit marignallyclever.com. The robot currently lacks Java code for ease of operation. Features include GCODE running capability, a 1500g static holding force, 20 degrees pitch and roll, 10 degrees yaw, +/-40mm heave, surge, and sway, with dimensions of 165mm x 230mm x 190mm (high at rest, ~230mm at center position) and weighing approximately 1650g. It boasts a repeatability of +/- 0.125mm, limit switches, and homing (G28). V2.1 replaced some laser cut parts with 3D printing due to reliable printers' availability. Arduino code, Bill of Materials, and assembly instructions are on Github, with 3mm birch ply for laser-cut parts.
With this file you will be able to print Stewart Platform v2.1 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Stewart Platform v2.1.