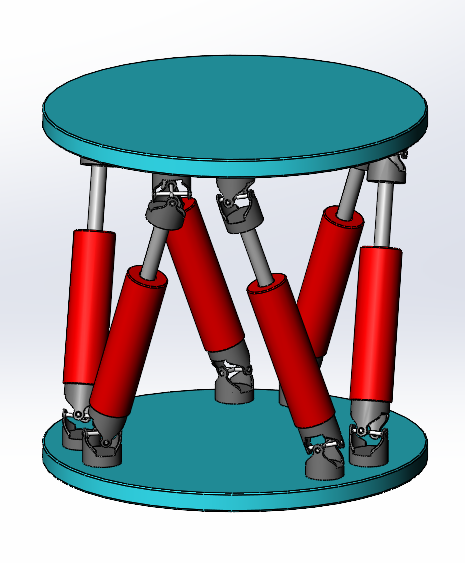
Stewart Platform / Stewart Mechanism / Parallel Manipulator / Hexapod
grabcad
It has six degrees of freedom. These degrees of freedom consist of three translational movements (along the x, y, and z axes) and three rotational movements (pitch, roll, and yaw). This allows the platform to move and orient itself in a three-dimensional space.
Download Model from grabcad
With this file you will be able to print Stewart Platform / Stewart Mechanism / Parallel Manipulator / Hexapod with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Stewart Platform / Stewart Mechanism / Parallel Manipulator / Hexapod.