Stepper Motor Robotic Arm1
pinshape
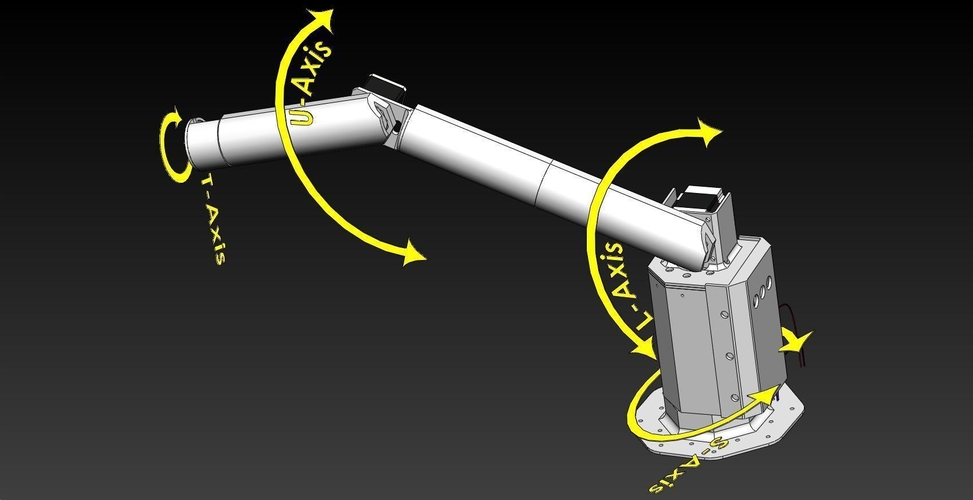
The pictures and parts should be sufficient to demonstrate how to construct the robotic arm. The base motor is a NEMA 23 rated with ample torque to rotate all the weight carried by the arm. Next, select a NEMA 23 stepper motor that offers even more torque, powerful enough to lift the arm and attached weights. The third servo motor should be a NEMA 17 stepper motor, likely as potent as you can acquire. Finally, choose a gripper or other tool of your preference for the robotic hand. To secure the arms to the stepper motor axles, I will utilize Gorilla Glue initially, allowing me to avoid purchasing hub clamps. After testing, I will redesign the "Spinners" to accommodate the hub clamps. This kit is engineered to work in conjunction with a RoboGuts circuit board and three or more Stepper Motor Drivers. Visit http://www.R2Pv1.com/ for further information. I intend to attach a gripper plate after first 3D printing the robotic arm for personal use and conducting a few tests. This will enable me to assess how much weight the arm can lift, thereby determining the gripper required to pick up the load.
With this file you will be able to print Stepper Motor Robotic Arm1 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Stepper Motor Robotic Arm1.