Spotmicro - robot dog
thingiverse
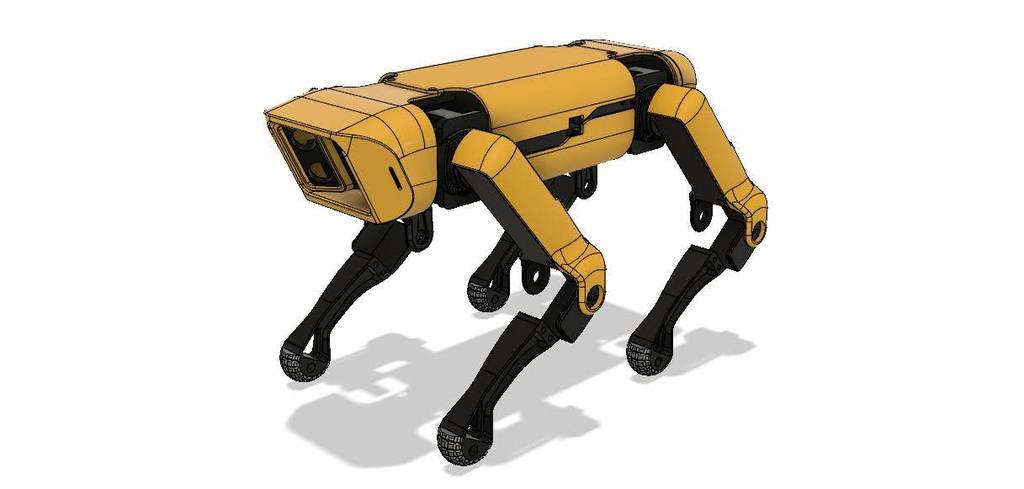
I designed Spotmicro inspired by Boston Dynamics' Spotmini. It runs on an Arduino mega, and if you choose a different board, you'll need to redesign the 'plate' file yourself and print the 'non-mega' file instead of the standard one. The ultra sonic sensor can be used for mapping or obstacle avoidance. When attaching the servo horn to the 3D printed parts, you must use hot glue. There is no code yet, so you'll have to write it yourself. Assembly video part 1: https://youtu.be/03RR-mz2hwA Assembly video part 2: https://youtu.be/LV5vvmhwtxM Instagram: https://www.instagram.com/kim.d.yeon/ To make this, you will need the following... Electronics: 12 MG 996 R servo motors 1 Arduino Mega 2 HC-SR04 ultrasonic sensors 1 HC-06 Bluetooth module 1 MPU-6050 gyro sensor 1 I2C 16x2 LCD module 1 RL3-4 rocker switch 7.4v Battery Screws, Nuts and Bearings: 8 M5×15 screws 40 M4×20 screws 8 M4×15 screws 48 M4 nuts 4 M3×20 screws 28 M3×10 screws 16 M3 nuts 8 F625zz Flange ball bearings Servo Upgrade: I uploaded upgrade parts for cls6336hv servo. To use cls6336hv servo, print the '~_cls' file. If you want to use mg995 or mg996r servo, please print the '~_mg' file. A file without any markings is part of any type of servo. Made by Deok-yeon Kim
With this file you will be able to print Spotmicro - robot dog with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Spotmicro - robot dog.