Split Ring Planetary Gearbox
prusaprinters
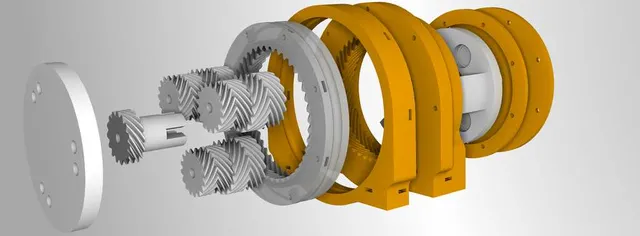
This is my design of split ring planetary gearbox for the shoulder joint of the RR1 Robotic Arm with the reduction ratio of 1:40. It is designed to increase torque of a big Nema 23 stepper motor. The gearbox requires 7 bearings 625 (16x5mm, 2 more oustide bearings are needed if mounted to the robot), 3mm metric screws of various lengths, 3mm square nuts (holes for nuts are prepared), 5mm bolts, and many 6mm bearing balls (G40) for custom ring bearing . I recommend to print gears and rings with carbon fiber filled material like Prusament PC blend with CF. For serious builds I also recommend to fine tune sizes of gears directly in CAD sources. For CAD sources please see: https://github.com/surynek/RR1 For the RR1 Robotic Arm project please see: https://hackaday.io/project/185958-rr1-real-robot-one-a-diy-desktop-robotic-arm and https://surynek.net/_main/index.php?select=research#RR1rev2
With this file you will be able to print Split Ring Planetary Gearbox with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Split Ring Planetary Gearbox.