Small XY servo movement
thingiverse
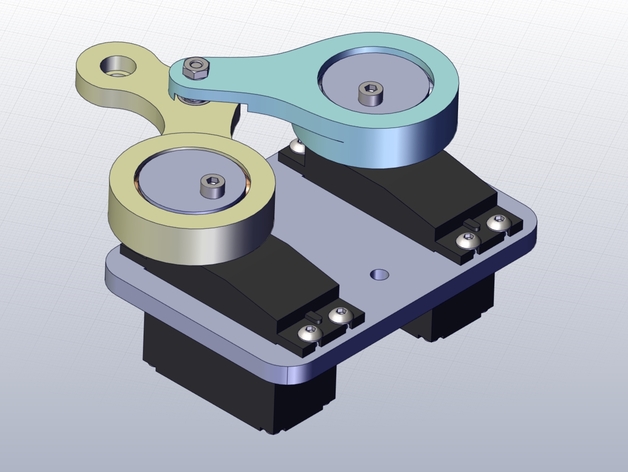
If a small movement (10x10mm) with big force and high speed is required, the current design stands out as the ideal solution. Utilizing an eccentric bearing, the servo's rotation is efficiently converted into linear movement. This type of movement is similarly employed in Shaper tool - https://shapertools.com/. A video demonstrating how this design works can be found on: https://www.youtube.com/watch?v=ErpPezxVQ-A. To convert the rotation angle of the servos to Cartesian coordinates, some trigonometry calculations are necessary. In fact, these calculations are identical to those used in double SCARA robots or "five-bar" robots. A notable example that includes a C++ library is listed below: http://robdobson.com/2015/05/scara-arm-calculations/. The C code (uploaded as a ZIP file) can be found on: https://developer.mbed.org/users/Bobty/code/SCARA_Arms/. An image with the relevant formulas from robdobson.com is uploaded below, showing how the eccentricity functions as the distance "ShoulderToElbow". Another useful resource for trigonometry explanations (albeit not directly applicable to SmallXY due to elbow = shoulder) can be found on: http://forum.conceptforge.org/viewtopic.php?f=7&t=184. The same principles used in Wally RepRap could also be applied to the SmallXY calculations. Further examples of double SCARA robots include: http://www.3ders.org/articles/20130913-reprap-wally-beta-kit-makes-first-moves.html and http://www.mecademic.com/DexTAR.html
With this file you will be able to print Small XY servo movement with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Small XY servo movement.