Slip-On Plastic Forearm for the RoboNova-1 BiPedal Robot
thingiverse
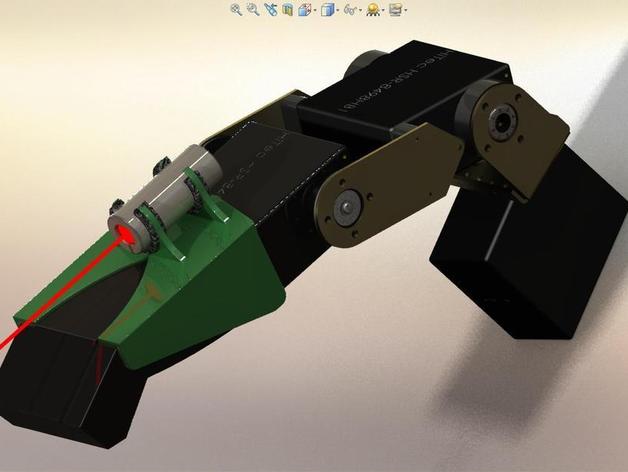
The forearm, designed to fit over an existing one, uses rubber cement or similar adhesive for temporary attachment. Access free 1mm thick aluminum/alloy parts from the 3D Content Central Library (http://www.3dcontentcentral.com/Search.aspx?arg=wperko). Microsoft Robotics Studio software is also free and importable to these files. Adjustments may be needed for MakerBot printing materials, so a MakerBot is useful for learning. Large overhangs can be difficult; flat versions are provided. Sketch orientation differs between SolidWorks and MakerBot files at -90°. This design is entered into the makezine.com/go/makerbot contest. After MakerBotting, use a rubber grommet or tape to fit a small short laser pen into the 12mm diameter mounting bores; plug the laser into Port 15 of RoboNova-1 and use a TTL-2-PWM adapter for control. If successful, share the build-file and machine type for others to use.
With this file you will be able to print Slip-On Plastic Forearm for the RoboNova-1 BiPedal Robot with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Slip-On Plastic Forearm for the RoboNova-1 BiPedal Robot.