Sense Glove
thingiverse
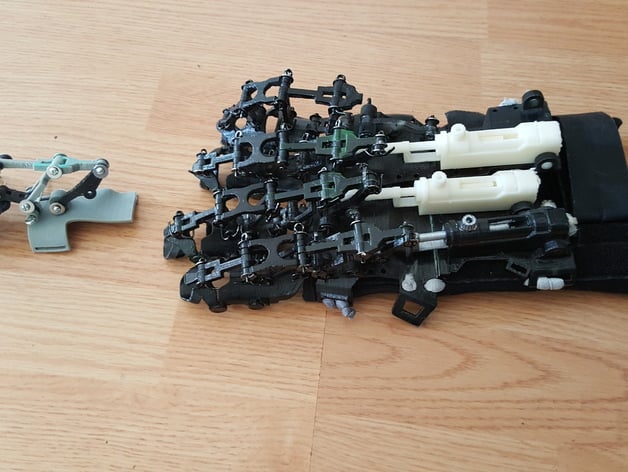
https://www.youtube.com/watch?v=Ud5CIE_q-XU https://www.youtube.com/watch?v=di3E9-ii3n8 Sense Glove is a revolutionary exoskeleton glove that forces the hand closed or open based on user input. This game-changing glove is a rough prototype and mechanical layout for future better designed exo gloves, serving as an open-source foundation for innovators to enhance its capabilities. The goal of this design is to spark the community's creativity, encouraging collaboration and contributions to bring this innovative project to life. Print Settings: Rafts: Yes Supports: Yes Resolution: Best Infill: Solid or close to it Notes: Scaling down the models may be necessary due to their size. I scaled mine down by 70%, resulting in a good fit for my thick fingers. Printing multiple "pointer mid" model iterations can ensure an accurate fit. Also, consider rotating the models and cutting away the strap on the pointer base knuckle if your fingers are too large. How I Designed This My vision behind creating Sense Glove revolves around the idea of immersing users in virtual reality by allowing them to physically interact with 3D objects. Imagine grabbing a gun, feeling its weight and texture, and pulling the trigger - a sensation that's impossible with traditional controllers. To make this concept a reality, I delved into researching exo skeleton gloves and discovered Festo, a German robotics company pioneering in this field (https://www.festo.com/group/en/cms/10233.htm). By studying their mechanics and designs, I was able to craft my own version of the Sense Glove. I'm thrilled about the potential for innovation and contribution that Sense Glove presents, especially for communities like E-nable.
With this file you will be able to print Sense Glove with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Sense Glove.