Self Balancing and Obstacle Avoiding Bot using PID Control
grabcad
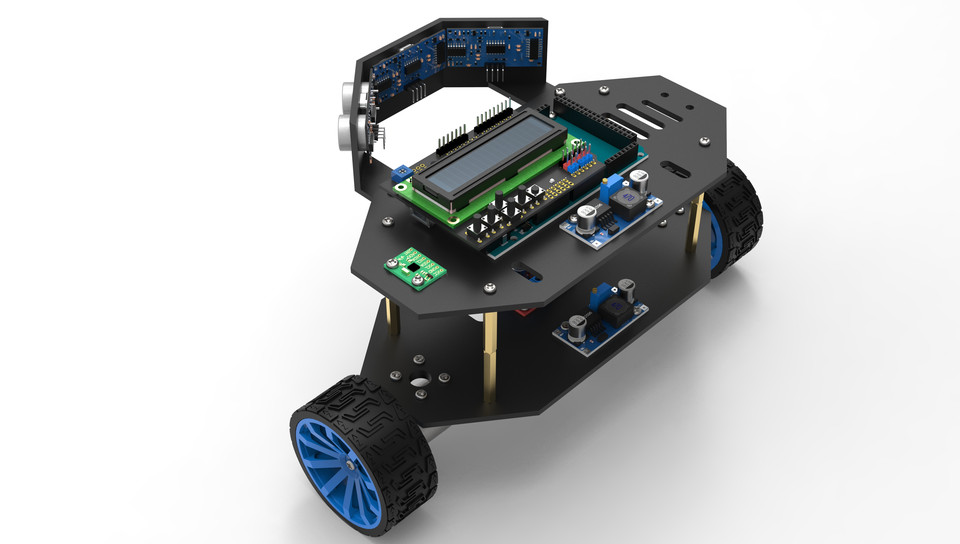
The project requirement was to design and fabricate an obstacle avoiding, self balancing bot using PID control. An arduino microcontroller board along with an mpu6050 IMU sensor was used for sensing and controlling. Generic DC metal gear motors and a L298 motor driver were used which were powered by a lipo battery. For obstacle avoiding purpose 3 sonar sensors were added to the controller board for distance feedback. Suitable values of Kp, Ki and Kd were calibrated for PID application. The whole structure was designed in solidworks, rendered in keyshot and then 3D printed. All the electrical parts were taken from Grabcad for assembly purpose. The main purpose of designing before fabrication was that the mass of center would have to be in the middle which was crucial for balancing. Designed in solidworks, rendered in keyshot. Reach me out for any issues with assembly file opening. Check the youtube link for exploded view animation and real life testingGithub for code- https://github.com/Ariful17/Self-Balancing-Robot-with-PID-Control.git
With this file you will be able to print Self Balancing and Obstacle Avoiding Bot using PID Control with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Self Balancing and Obstacle Avoiding Bot using PID Control.