SeaPerch ROV Assembly
thingiverse
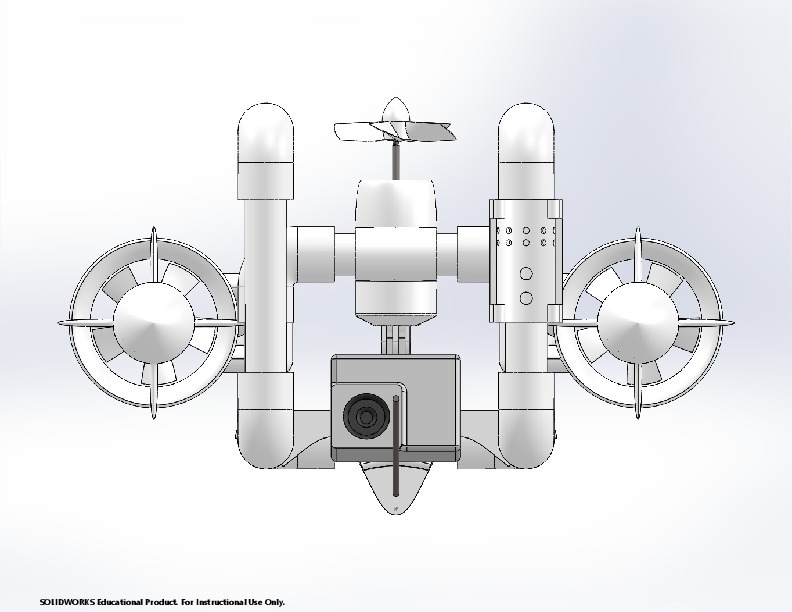
I designed the SeaPerch ROV, equipping it with a camera that utilizes RG-174 coaxial cable as an antenna and tether, paired with WiFi connectivity. The control system features a PID controller in conjunction with an MS5540-CM depth sensor to maintain precise depth by adjusting PWM signals to the vertical thruster. Manual control over right and left thrusters enables forward and reverse motion at variable speeds, while programmed adjustments ensure smooth turns to the right or left.
Download Model from thingiverse
With this file you will be able to print SeaPerch ROV Assembly with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on SeaPerch ROV Assembly.