Rov Manipulator (Parallel Gripper)
thingiverse
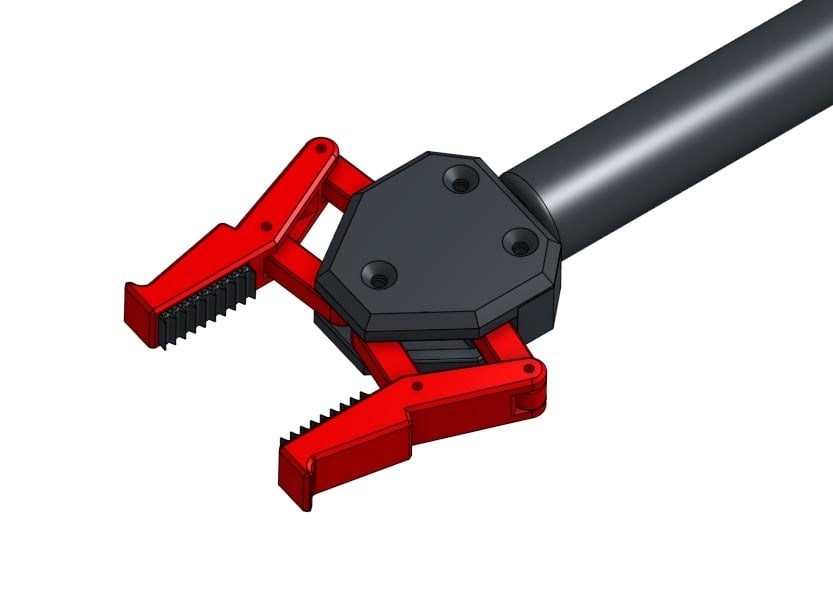
This is a compact Parallel Gripper designed for use with a Remote Operated Vehicle (ROV) Manipulator. It's engineered to fit seamlessly into a manipulator arm constructed from 1/2-inch PVC Pipe and powered by a geared motor spinning the shaft. These grippers were created to be easily swapped out for various missions, requiring minimal adjustments. The files provided are specifically designed for the gripper part of the manipulator, but for ideas about the rest of the assembly, visit http://www.homebuiltrovs.com/rovforum/viewtopic.php?f=18&t=1668&hilit=reboot&start=80. **Hardware Requirements:** For proper assembly (refer to pictures for screw layout), you will need: All screw holes are pre-tapped for easy installation. (4) 2-56 x 1/2" screws (4) 4-40" x 3/8" Button Head Screws (3) 4-40 x 3/8" Flat Head Screws (1) 4-40 Setscrew A 1/8-inch Diameter Stainless Steel Rod This design was printed in PLA at 80% Infill, but for underwater use, a higher infill is recommended. Some parts require specific orientation for proper printing. The fingers and forward hinges need to be printed twice, while the finger pads were printed with flexible filament for improved grip, or can be cut from rubber.
With this file you will be able to print Rov Manipulator (Parallel Gripper) with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Rov Manipulator (Parallel Gripper).