ROV
thingiverse
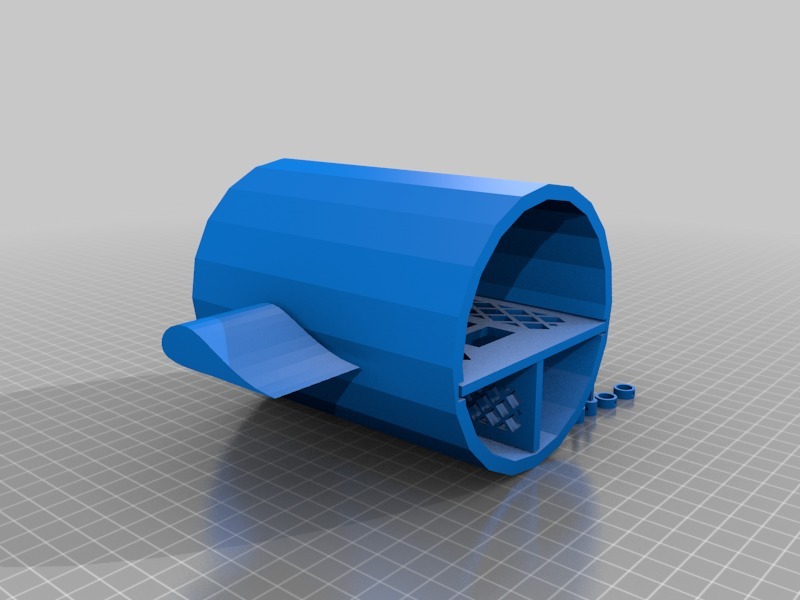
Working on v3. The rudder arms seem to need more meat to them. This is a basic underwater ROV modular design I'm working on. This is the core of it - containing servos, ESCs, batteries and PCBs. The rear module, still unbuilt, will contain a single motor. The front module, also unbuilt, will feature a camera/gimbal setup. Focusing on the hard parts first. If you want to remix or print this design, please break it apart into separate objects: 1) Rudders and connectors 2) Hull (using support material) 3) Insert Tray (using support material) Rudders are designed with push rod boots that will be zip-tied onto them after they've been inserted through the hull. Testing is ongoing to determine how water-proof this setup will actually be. The insert tray is designed to hold two 30mm servos and enough surface area for batteries, ESCs, receivers, and PCBs to be zip-tied to it. O-rings used: 75mm https://www.amazon.com/FemiaD-Rubber-Shaped-Gasket-Washer/dp/B078V4MLVK Fasteners: M4 - 20mm screws: https://www.amazon.com/uxcell-Alloy-Steel-Socket-Screws/dp/B017NENNVS (don't forget nuts for the other end) M2 - 4mm fasteners (for lock collars): https://www.amazon.com/uxcell-M2x4mm-Thread-Button-Socket/dp/B01B1OD83Y The hull's depth is 127mm, so a long M4 driver will be necessary to reach the screw heads.
With this file you will be able to print ROV with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on ROV.