Rotary swivel unit 4 scanner / Dreh- Schwenkeinheit für Scanner
prusaprinters
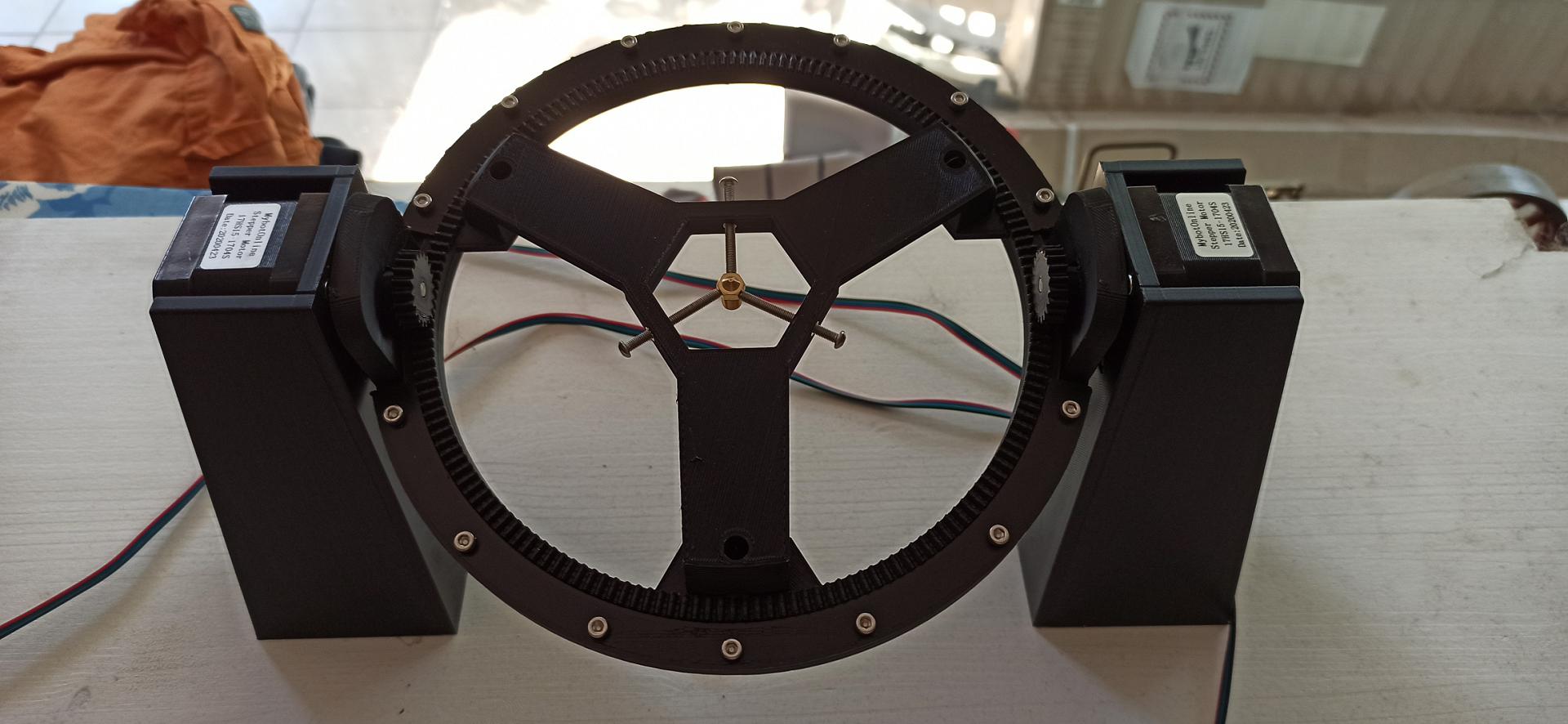
<h3><strong>Dreh-/Schwenkeinheit für Scanner (z.B. OpenSCAN)</strong></h3><p> </p><p><strong>Update</strong>: Es gibt nun eine Lösung für OpenScan: </p><p><a href="https://github.com/OpenScan-org/OpenScan2/issues/64">https://github.com/OpenScan-org/OpenScan2/issues/64</a></p><p> </p><h5>Wichtig:</h5><p>Es sind bis jetzt nur die mechanischen Komponenten vorhanden. Eine Steuerung, z.B. mt Arduino oder Raspberry PI, wird noch gesucht. Sollte jemand soetwas erstellen, würde ich mich über eine Info freuen.</p><p>(Ich persönlich suche übrigens eine Variante, die extern mit Python angesteuert werden kann)</p><h4>Funktion:</h4><p>An der Dreh-/Schwenkeinheit sind 2 NEMA17 Schrittmotoren verbaut. Dadurch kann das Bauteil um seine eigene Achse gedreht und geneigt werden.</p><ul><li>Beide Motoren in selber Drehrichtung: Das Bauteil dreht sich um seine Längsachse</li><li>Drehrichtung der Motoren gegenläufig: Das Bauteil dreht sich um seine Querachse</li></ul><p>Die Kamera wird dabei externan einem Stativ (oder ähnlichem) positioniert.</p><p>Die von mir eingespannte Düse dient nur der Demonstration. </p><p>Die Step-Datei <i>Zahnkranz </i>dient dazu, eigene Bauteilaufnahmen zu erstellen. </p><h4>Montage</h4><ol><li>Die Gewindeeinsätze in alle 17 4mm-Löcher der <i>Aufnahme </i>einschmelzen. 3 weitere in den <i>Zahnkranz</i>. Dann den <i>Zahnkranz</i>, die <i>Aufnahme </i>und die beiden <i>Klammern </i>mit M3x10mm Schrauben verschrauben.</li><li>Nun die beiden Kugellager in die <i>Aufnahme </i>pressen.</li><li>Die beiden NEMA 17 und die <i>Seitenhaltern </i>mit 8x M3x6mm Schrauben verschrauben</li><li>Jetzt jeweils Seite für Seite die Achse des NEMA 17 durch das Kugellager stecken und dabei gleichzeitig das <i>Zahnrad klein</i> auf die Achse pressen/drücken.</li></ol><p> </p><p>English</p><h5>Importend:</h5><p>Right now there are only mechanicle parts. A controler like Arduino- or Raspberry Pi based is not ready yet. But I am looking for it. So, if you build are able to build it please inform me.</p><h4>Funktion:</h4><p>There are 2 NEMA 17 Steppers installed.</p><ul><li>Both stepper CW: The part is turning round his own axis.</li><li>One stepper CW, the other CCW: The part ist turning round the Stepperaxis.</li></ul><p>A camera has to be mounted external on a tripod or similar.</p><p>The nozzle in the pictures is only to demontrate how to use the fixture.</p><p>The Step-file <i>Zahnkranz </i>can be used to design own fixtures.</p><h4> </h4><h4>BOM</h4><p>1x Aufnahme</p><p>2x Klammer</p><p>1x Zahnkranz</p><p>2x Seitenhalter</p><p>2x Zahnrad klein</p><p>2x Nema 17 (Wellendurchmesser 5mm, z.B. vom Anet A8 )</p><p>min. 17 Gewindeeinsätze M3 (ich habe ruthex M3S verwendet)</p><p>2 Kugellager 635 2z (oder ähnlich)</p><p> </p><p>Ich hoffe ich habe nichts vergessen. Rückmeldungen nehme ich gerne entgegen. </p>
With this file you will be able to print Rotary swivel unit 4 scanner / Dreh- Schwenkeinheit für Scanner with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Rotary swivel unit 4 scanner / Dreh- Schwenkeinheit für Scanner.