Rotary Stewart Platform v1
thingiverse
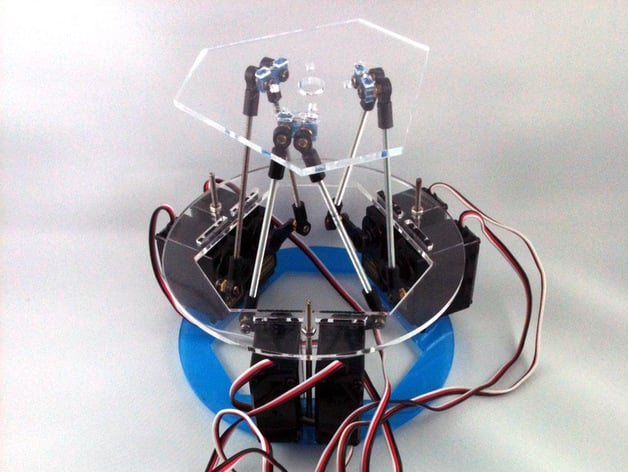
Stewart Platforms have various applications, such as in flight simulators, CNC machine equipment, robotic surgeons, and connecting the ISS to space shuttles. The "Rotary" model was designed using rotary action for each arm, differentiating it from linear platforms that use linear actuators. It aims to help university students avoid reinventing the wheel when seeking a platform; they can simply opt for this open-source design and contribute to its development. If you utilize this design, kindly inform the designer to share your work with others interested in this project. To access the code for "RotaryStewartPlatform," visit http://www.github.com/MarginallyClever/RotaryStewartPlatform/. For parts, use the kit available at http://bit.ly/ZO0Dec or laser cut the design, requiring two frames, one end effector 1, and three end effector 2. Additionally, you'll need three TAMIYA 70171 kits; cut the M3 rods in half. Assemble following the provided images, securing servos with extra M3 rods. Upload firmware, run GCODE from a serial interface window, and an extra end effector plate will be available for use. Improvements to inverse kinematics and a Java interface would be highly appreciated by the designer, as well as development of forward kinematics, a challenge beyond their math skills.
With this file you will be able to print Rotary Stewart Platform v1 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Rotary Stewart Platform v1.