Robot Sensor Horn for Sharp IR Sensors
thingiverse
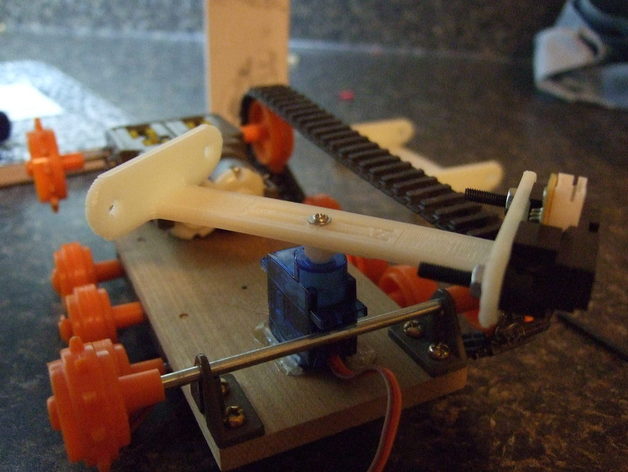
This sensor horn was designed for implementing a simple mapping algorithm in a mobile robot. With two sensors and a standard micro servo (sourced from eBay), you can cover 360 degrees with just one 180-degree rotation. Initially made of wood, the design will be improved using a ToM. The user aims to print the new horn without needing a dremel drill press and plans to replace the ABP's belt, currently reinforced with kapton tape due to warping issues. Additionally, there are numerous possibilities for printer tuning. The mapping algorithm uses the rotation time of the horn to calculate polar coordinates for 360 degrees around the robot, offering similar results as taking measurements every (rotation time)/180 for each sensor. The robot ensures accurate movement by waiting a set delay before taking measurements when moving one direction. Currently, the robot can hug walls, avoid obstacles, and navigate through doors, but its mobility is limited due to a missing tank tread.
With this file you will be able to print Robot Sensor Horn for Sharp IR Sensors with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Robot Sensor Horn for Sharp IR Sensors.