Robot leg v.HS-55
thingiverse
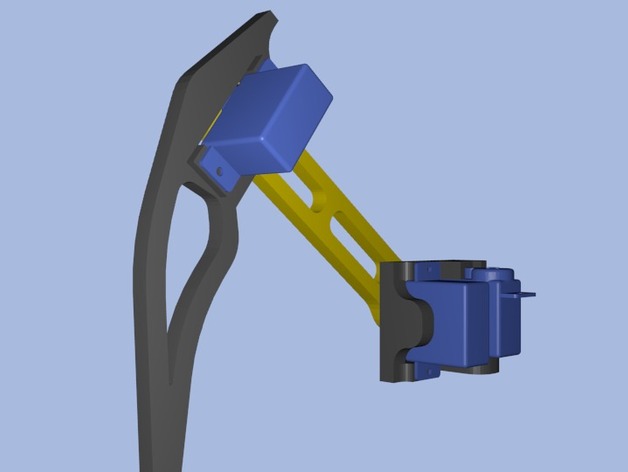
A prototype test for a spider robot leg assembly is underway, featuring hip x-rotation and leg bend servos. The hip z-rotation bracket is still in progress, followed by body mounting design. Leg weight and structure are light while maintaining an appealing look. Servo calculations indicate quick walking capability with support for the robot's weight and controller (AtMega238). However, power supply support is not included yet. Updates will follow after walk cycles are refined and missing joints are designed. Recent updates include prototype images of a double servo holder for hip joints and adjustments to leg assembly tips for added stiffness. Spelling corrections have also been made. The model is printable, requires two Hitech SH-55 servos, and programming of desired walk cycles. Some post-print modifications may be necessary for optimal fit based on 3D printer resolution.
With this file you will be able to print Robot leg v.HS-55 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Robot leg v.HS-55.