Robot Arm For AX-12A Dynamixel Actuators
thingiverse
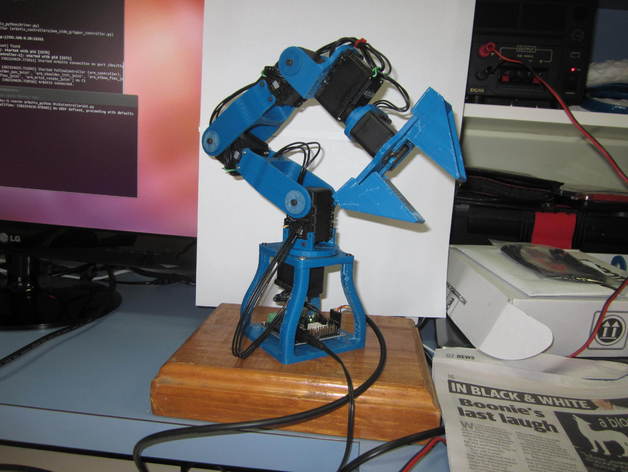
This six-degree-of-freedom robot arm utilizes AX-12A Dynamixel actuators, similar to the Turtle Bot arm design. Essential components include six AX-12A Dynamixels, an ArbotiX-M Robocontroller, and corresponding cables: one 100mm and five 200mm cables. The Phantom X Pincher assembly guide from Trossen Robotics serves as a helpful resource due to similar designs. Additionally, a 35mm x 52mm x 4mm needle roller bearing thrust ball is needed, which can be purchased inexpensively on eBay. The arm also requires three RC car wheel bearings (5x11x4mm) for the elbow, wrist, and shoulder joints. Necessary nuts and bolts include M2 x 8, M2 x 10, M3 x 10, and corresponding M2 nuts. A variety of 3-D printed parts are required: one each of base_legs_arbotix_m.stl, base_turn_table_bot.stl, base_turn_table.stl, base_turn_table_spacer.stl, wrist.stl, wrist_rotate.stl, and the_crawer_base.stl; two each of the_crawer_lever.stl and the_crawer.stl; and three servo_hinge_flange.stl. Most hobbyist 3-D printers should suffice, but some parts may need to be filed or adjusted for proper fit.
With this file you will be able to print Robot Arm For AX-12A Dynamixel Actuators with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Robot Arm For AX-12A Dynamixel Actuators.