Robot Actuators
prusaprinters
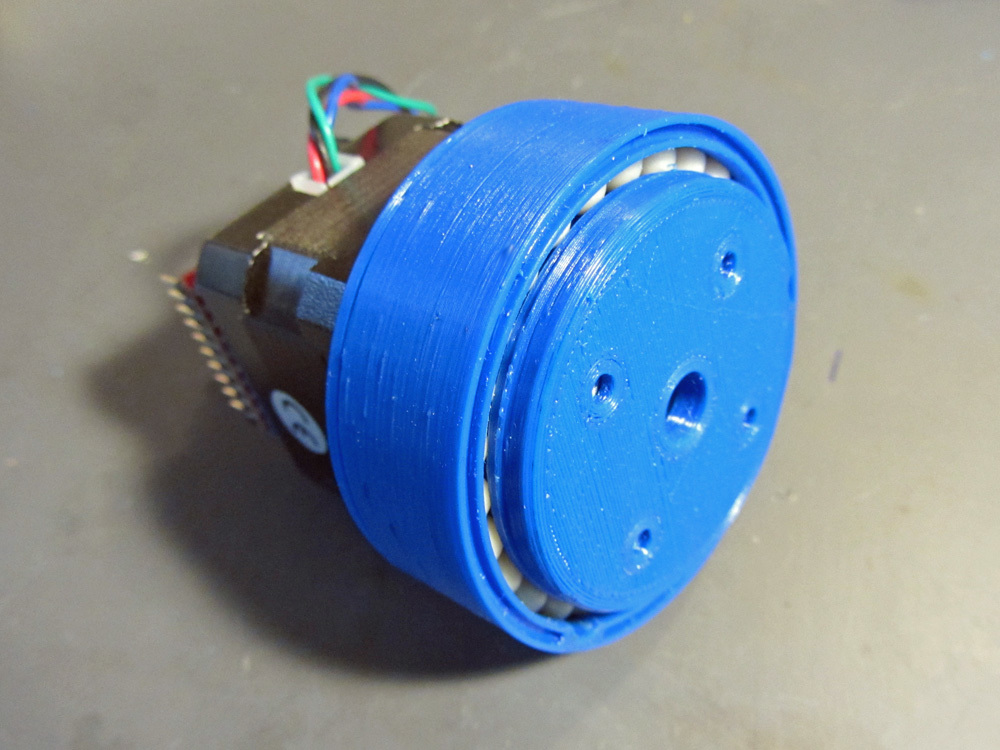
<p>This is a collection of three different sized compound planetary gearboxes with compact form factors ideal for assembling into robot arms. All three sizes use 38.4:1 compound planetary gearing and include an integral slew bearing. The pancake configuration and convenient mounting surfaces make it easy to build your own robot arm by stacking the actuators a'la the UR3 or Sawyer industrial robots.</p> <p>The largest actuator (for arm base joints) is about 3.4" in diameter and uses 20 pitch helical gears. It is designed for use with higher torque NEMA 17 stepper motors. The medium sized actuator is about 2.4" in diameter and uses 30 pitch helical gears and is designed for smaller NEMA 17 steppers. The smallest actuator is 2" in diameter and used 40 pitch helical gears and is designed for 35mm "tin can" style steppers. All three have an integral slew bearings that use 6mm plastic balls (airsoft BB's) to support the mounting surface for the next robot arm link.</p> <p>(And for those of you curious about the teaser photos of the robot arm shown, It's posted here: <a href="https://www.thingiverse.com/thing:3327968">https://www.thingiverse.com/thing:3327968</a>)</p> <p>UPDATE: I've posted CAD files for the different version in parasolid format.</p> Category: Engineering
With this file you will be able to print Robot Actuators with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Robot Actuators.