Robot 4x4 car with arm Arduino controlled
thingiverse
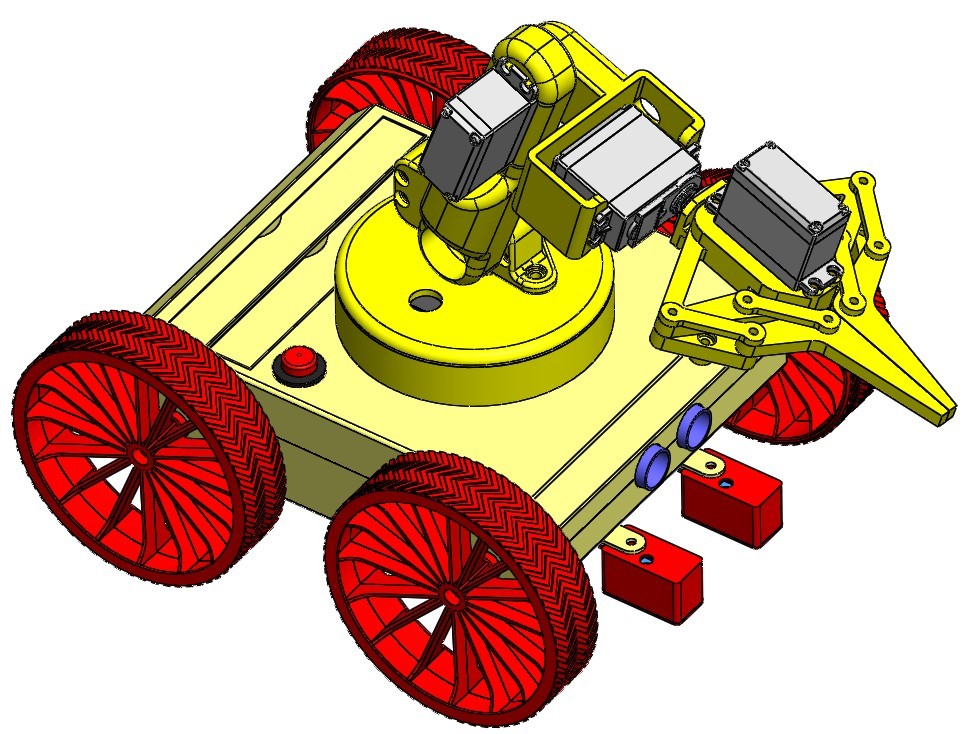
This is an autonomous robotic car with arm controlled by Arduino technology. All components are 3D printed using PLA material, except for wheel treads, which are made from flexible materials and printed separately. The printing settings include a layer thickness of 0.3mm, resulting in minimal need for support structures. Assembly involves the use of M3 or 1/8’’ bolts with two nuts to secure movable parts of the arm, while electronics and fixed components are secured using 3mm self-tapping screws. Four 608zz bearings are also required. The electronics system consists of an Arduino Nano board, a 16 Channel PCA9685 module, an HC-05 Bluetooth module, a BMS 2S Equalizer 8,4V 10A power supply unit, a 4 I/O Logic converter, a Step Down LM2596 voltage regulator, and a Step Up MT3608 voltage regulator with MicroUSB connectivity. Additionally, the system includes two IR Proximity Sensors and an SR-04 ultrasonic sensor. Power is provided by four x 18650 3.7V Li-ion batteries. The robotic car features four MG996R Continuous Rotation Servo motors for wheel movement and five MG996R Servos for arm movement. Optional accessories include a pushbutton, battery terminals, and DuPont Female-Female Cables. A PDF document within the Thing files provides schematics and Arduino code for controlling the robot. The robot can be controlled using an Android App developed with App inventor (http://ai2.appinventor.mit.edu/#5846191894560768). Although the standard App is not multitouch enabled, a separate multitouch App is included in the Thing files, compiled using a multitouch extension in App inventor. To view videos of the robotic car in action, visit: https://youtu.be/gIKDALMxfhc https://youtu.be/LeH3lr7XWro
With this file you will be able to print Robot 4x4 car with arm Arduino controlled with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Robot 4x4 car with arm Arduino controlled.