RMOBOT
prusaprinters
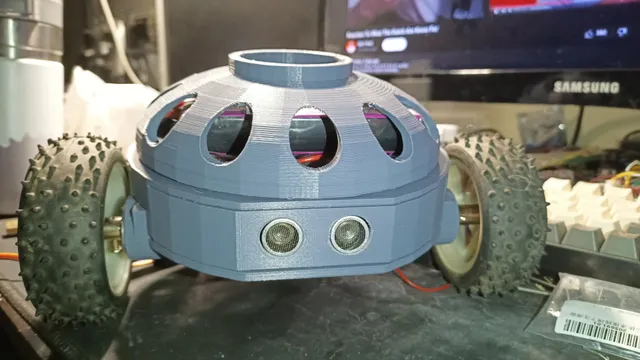
This is a simple robot that i created as study/debug object for my new lawnmower robot (todo). The robot has a sensor to sense distance. I the distance is ok (>30cm) the robot will move forward. If the distance is not ok (<30cm) the robot will turn until has has enough free space to move forward again.The current state of the robot is proof-of-concept/ working prototypeMore features will be added in the near future. Some soon to come features are:Sound (speaker)Light WS2812 ledstripServo motor with light sensor to sense the location of the sun. The sun can then be used as navigation beacon for outdoor use (eg: lawnmower robot)ESPNOW remote control Parts:ESP32-C3 MINIMotor 25GA-370 (12V 360rpm) x2Motordriver ZK-5AD (2x5 Ampere 12V)DC/DC convertor (from 12 to 5 V)RC Battery (12V)On/Off switchWire/PBC/Soldering iron /etc The motordriver is connected to pin0 and pin 1 (motor 1) and pin2 and pin 3 (motor2) of the ESP.The sensor is connected to pin 5 and 6 of the ESP.The on/off switch is between the battery and the 12V usersThe ESP is powered by the DC/DC convertor
With this file you will be able to print RMOBOT with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on RMOBOT.