Rival Blaster
thingiverse
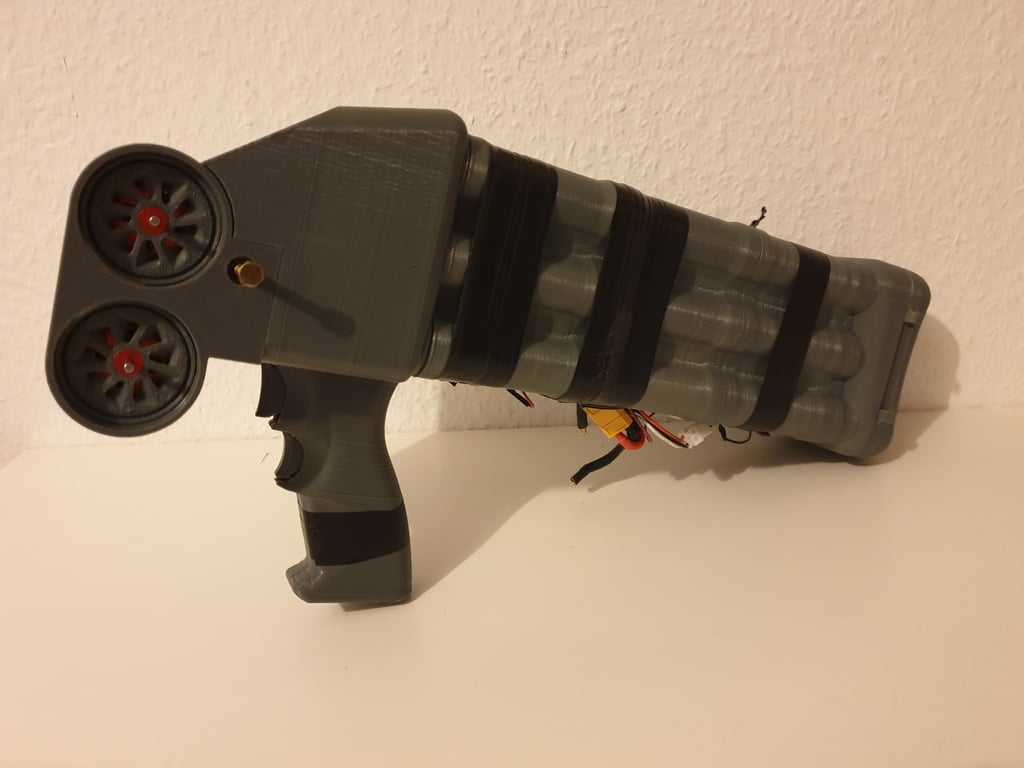
This is a brand new version of my blaster that's fully compatible with Nerf Rival rounds. The design should be more streamlined, cheaper to produce, and much quieter without the need for an EDF. The key components include: 2 x Racerstar BR2212 1800KV 2-4S Brushless Motor 1 x 35mm brushless EDF 3 x ESC 1 x N20 Micro Speed motor 1 x 4S LiPo 1 x Arduino Pro Mini 1 x h-bridge for controlling the feeder (this one's optional) Check out this YouTube video to see it in action: https://youtu.be/qruwTxABoGA Here's a basic Arduino code to get you started: This script requires the servo.h library. Motors: Servo motorTop; Servo motorDown; Servo motorEdf; int motorFeedHBridgeEn = 4; // H-Bridge Enable int motorFeedHBridgeDirection = 2; // H-Bridge input Potentiometers: int wheelSpeed = 0; int wheelSpeedValue; int hopUp = 1; int hopUpValue; int edfSpeed = 2; int edfSpeedValue; int feed = 3; int feedValue; Sensors: int counter = 5; // count fired shots Buttons: int trigger = 6; // control feeding motor int rotate = 7; // start wheel cage int loader = 8; // start EDF void setup() { motorTop.attach(9); motorDown.attach(10); motorEdf.attach(11); } void loop() { // Release the trigger, reset motors motorTop.write(0); motorDown.write(0); motorEdf.write(0); digitalWrite(motorFeedHBridgeEn, false); // Load rounds while (digitalRead(loader)) { motorEdf.write(edfSpeedValue); } // Arm Nerf while (digitalRead(rotate)) { // Read potentiometer values and scale them for motor control wheelSpeedValue = analogRead(wheelSpeed); wheelSpeedValue = map(wheelSpeedValue, 0, 1023, 1500, 2000); hopUpValue = analogRead(hopUp); hopUpValue = map(hopUpValue, 0, 1023, -100, 100); edfSpeedValue = analogRead(edfSpeed); edfSpeedValue = map(edfSpeedValue, 0, 1023, 1500, 2000); while (digitalRead(rotate)) { motorEdf.write(edfSpeedValue); motorTop.write(wheelSpeedValue - hopUpValue); motorDown.write(wheelSpeedValue + hopUpValue); // Control feeding motor while (digitalRead(trigger)) { digitalWrite(motorFeedHBridgeEn, true); digitalWrite(motorFeedHBridgeDirection, true); } // Release trigger and feed motor backwards to prevent jamming int i = 1000; while (i > 0) { digitalWrite(motorFeedHBridgeEn, true); digitalWrite(motorFeedHBridgeDirection, false); i--; } digitalWrite(motorFeedHBridgeEn, false); } }
With this file you will be able to print Rival Blaster with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Rival Blaster.