Reciprocating rectilinear motion actuator remixed
thingiverse
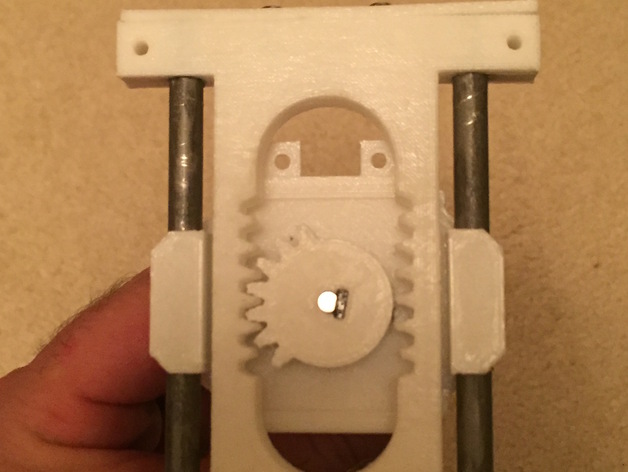
I'm designing a precise control PCB drill press and aim to automate the up-down motion of the actual drill component. Discovered this design and adapted it to suit my needs by making several key changes. I swapped out the original gear's inside diameter for one that measures 4mm, then added a recessed area for a square nut to secure the gear in place, preventing it from spinning due to its new design. The motor mount was also modified to accommodate my geared motor and allowed me to thin out the plate, enabling more of the pin to protrude through. Additionally, I recessed the screw holes to minimize interference with the gear, changed the rod size to 1/4 inch, and made corresponding adjustments to the extended plate rod size. I widened each of the rod holes on the extender to ensure a smooth fit for the 1/4 inch rod. Next, I plan to integrate a z-stop/sensor at either the top or bottom of where this is mounted, which will signal when the drill is up or down and halt the motor accordingly. With a single button press, the drill motor will start, followed by the actuator motor reaching full extension and retraction before stopping as instructed by the z-stop/sensor, after which the drill motor will cease operation. To further refine the speed of the actuator, I intend to add a potentiometer that allows for precise tuning. All screws employed are M3, with most being 8mm in length, while some nuts feature hexagonal and square configurations.
With this file you will be able to print Reciprocating rectilinear motion actuator remixed with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Reciprocating rectilinear motion actuator remixed.