Prosthetic Hand for designers to experience
pinshape
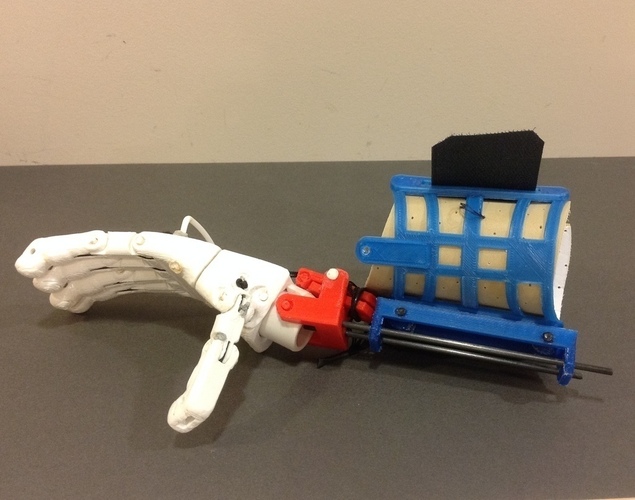
The Modular e-NABLE Research Platform (MeRP 1.0) is a custom-made wrist-actuated prosthetic hand designed for everyday use by able-bodied people. This innovative platform allows prosthetic designers to test and refine their creations in real-world settings, gathering valuable feedback from users who will ultimately benefit from their products. Designers can now experience firsthand the functionality of their prosthetic hands, sharing their insights with others in the e-NABLE community. Although this was an early prototype in my research, it has since evolved into the e-NABLE Prosthetic Emulator, a more advanced version that addresses some of its predecessors' limitations. The MeRP 1.0 consists of a "gauntlet" strapped to the user's forearm, supporting a prosthetic hand below their natural one. By flexing their wrist, users activate the fingers of the prosthetic hand, which moves in tandem with the user's natural motion. The movement is made possible by strings running through the prosthetic fingers like tendons, creating a grasping action. One of the key features of the MeRP 1.0 is its modular design, allowing users to experiment with different prosthetic hands, fingers, thumbs, gauntlets, and actuating mechanisms. This flexibility enables designers to evaluate the pros and cons of each component, refining their creations for maximum effectiveness. For more information on e-NABLE's innovative prosthetic hands created using 3D printing technology and provided free of charge to children, visit enablingthefuture.org. The MeRP 1.0 design was influenced by a prosthetic arm developed at the Rochester Institute of Technology by e-NABLE volunteers and other open-source designs shared within the community. For your convenience, I've included instructions for building the MeRP 1.0: To connect the Gauntlet to the Hand, use 1/8 inch carbon fiber rod from Amazon (be sure to order from a reliable source to avoid long shipping times). Print the Gauntlet halves in PLA on a flat printer bed at 90C and fold them around a form while still warm. I used an oval container from Crystal Light drink mix for my form. Hinge pins are made from 1/8 inch filament, melted onto the end with a soldering iron. You can obtain small packs of 3mm filament from 3Doodler if your printer uses 1.75mm filament. The grasping bar on the back of the hand is also fabricated from 3mm filament, which you can bend using a heat gun or flame and weld in place with a soldering iron or 3Doodler. The thumb module attaches to the palm module with pins made from 1/8 inch filament.
With this file you will be able to print Prosthetic Hand for designers to experience with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Prosthetic Hand for designers to experience.