Project Grip - Parametric Data Glove
thingiverse
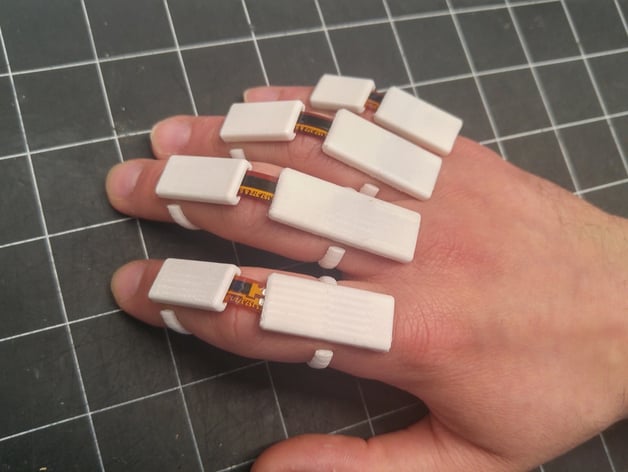
DIY Cyborg Data Gloves\nProject Grip is a minimalist data glove designed to control wearable computers with precision and ease. Its ring-like configuration exposes the fingers and palm, maximizing maneuverability while minimizing bulk.\nRequires Flexpoint polyimide-coated sensors for optimal performance. Spectra flex sensors are not compatible due to their inability to withstand the rough surface of the 3D-printed design.\nUnlike conventional data gloves, your Project Grip is engineered for everyday wear. It measures a single joint per finger, which is perfect for controlling a Google Glass, Moverio, Raspberry Pi, or other HUD computer. The low profile and minimal friction make your Project Grip comfortable enough to wear all day. If you break a ring, simply print another.\nWhat you get\nThis model includes four sets of finger sensor carrier rings, one for each finger. The rings are worn on the first and second joint and hold a polyimide-coated Flexpoint flex sensor with its factory-installed socket. \nYou must use a polyimide Flexpoint sensor to ensure accurate readings. Using Spectra flex sensors or uncoated sensors will result in damage due to their compatibility issues.\nMeasuring the sensors\nYou are expected to design and build your own wearable device to measure and act on the sensors with precision. The Flexpoint sensors are exceptionally repeatable and can be read with a simple resistor divider and modern ADC.\nNo thumb?\nThe thumb was intentionally left out to maintain manual dexterity. Wearing this sensor on the thumb would cover the tip and unnecessarily restrict movement.\nFAQ\nThere are many parameters to consider! Print a set, test fit, and then adjust anything that's uncomfortable or loose for optimal performance.\nWhat flex sensor can I use? You can use a Flexpoint polyimide (Kapton) flex sensor with the blue plastic socket. Make sure it comes in the desired size: 1", 2", or 3". You can buy these sensors directly from Flexpoint.\nCan I use a Spectra flex sensor? No, as they are not compatible with this design. Instead, consider using Flexpoint sensors for optimal results.\nBut I only have access to Spectra sensors! Life is tough. Wear a hat and be patient.\nWhy only one sensor per finger? It's all you need to pick up common gestures like pointing. More sensors would make the glove clunky and less practical.\nWhy no thumb? One of the thumb rings would need to cover the tip, making the finger useless. It's also very obstructive. You can often infer thumb position from the other fingers.\nWill these connect to my phone/brain/Google Glass/drone? Yes, you will just need to build the electronics yourself for seamless integration.\nWill you build those electronics for me? Yes, I offer a base rate of $150 per hour. It'll take about 50 hours to make your electronics work perfectly.\nBut I want to use this right now! Welcome to the exciting world of DIY cyborgs, broski!\nWhat are you connecting yours to? An Epson Moverio. I'll share more info when that's done for everyone's benefit.\nCould I use these to control a video game or a sequencer? You can definitely try, but please consider using your time more productively for better results.\nIs this a total ripoff of the Gest? Yes, and also the P5 Glove. It's all about innovation and improvement.\nWhy do you have tiny little baby fingers? I didn't get enough exercise as a kid.\nHow does this compare to the Power Glove? Far more accurate and less clunky than its counterpart.\n\nPrint Settings\nPrinter Brand: \n MakerBot\n \n Printer: \n MakerBot Replicator 2\n \n Resolution: \n Not relevant to the project's performance.\n \n Infill: \n Set at 20% for increased strength.\n \n Notes: \n Print with three shells for added durability. Ensure that the rings are parallel to the build plate to prevent layer boundaries from adding weak points. Use thick layers for test fits and high resolution for final prints to minimize uncomfortable rough spots.\nThe customizable script will generate each finger individually, saving you time and resources. Don't waste your time printing unnecessary fingers!
With this file you will be able to print Project Grip - Parametric Data Glove with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Project Grip - Parametric Data Glove.