Parametrized SCARA robotic arm. Customizable. 1200+ g PAYLOAD !!!
thingiverse
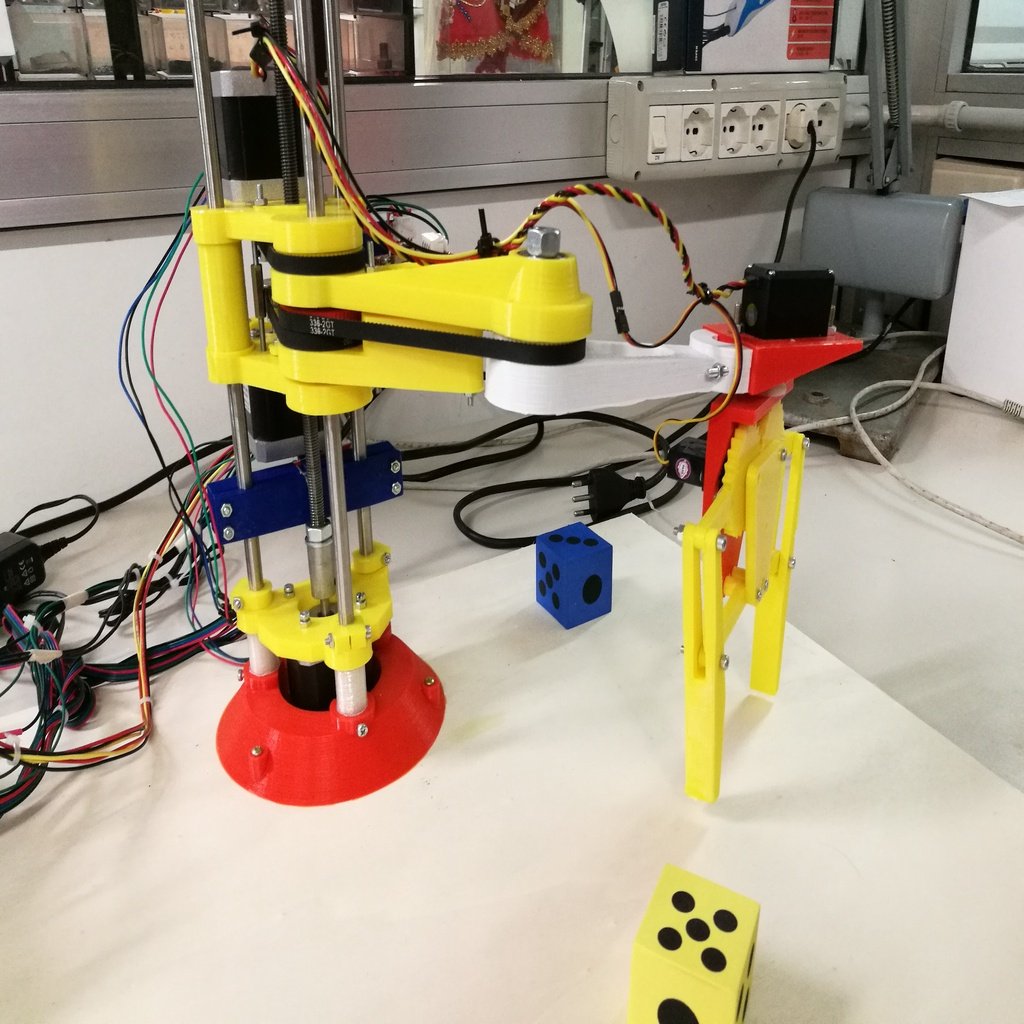
Masses were moved to improve efficiency. Two motors serve as counterbalances. The lifter motor was relocated closer to the base. The provided Openscad file includes a belt length calculator. The STL model is optimized for belts of 336 and 260 mm in length. Prototype effortlessly lifts payloads of up to 1200 g and 500 g, as evident from videos. A custom parametric gripper design was created. The openscad file specifies the maximum and minimum gripping widths based on user-defined parameters. It's fully customizable, including the servo used. See images for further details. Updates: * Blocking screws were added for top and bottom to provide extra stability. * Holes were drilled in the base for secure fixing. * A custom Marlin version with servo control was compiled. * A 2DOF gripper (wrist for HS645MG) was integrated. * The wrist and gripper were made more rigid. GT pulleys were created using a modified Parametric Pulley with multiple belt profiles, designed by droftarts in January 2012. Gears for the gripper were generated using a library developed by Leemon Baird in 2011. Videos demonstrating the prototype's capabilities can be found at: https://youtu.be/0FFZ8miT0VE https://youtu.be/YSeXhJgEgbk https://youtu.be/pRjkzyHDR5E Pick and rotate https://youtu.be/Pmd2hQuCnKQ servo test https://youtu.be/m5fS1hvsXi0 gripper test https://youtu.be/bAA7MBBQvXQ
With this file you will be able to print Parametrized SCARA robotic arm. Customizable. 1200+ g PAYLOAD !!! with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Parametrized SCARA robotic arm. Customizable. 1200+ g PAYLOAD !!!.