Parametric Robot Claw
thingiverse
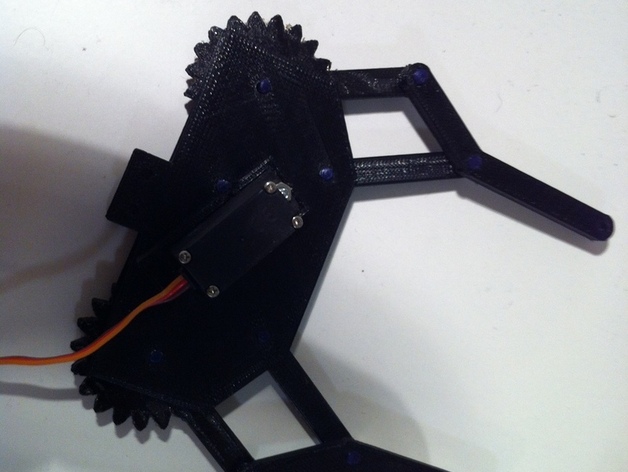
This robotic claw design accommodates diverse objects due to its customizable parameters. The example claw features a reduction gear stage for enhanced servo power and a wider profile, ideal for gripping 100mm cubic blocks. SCAD design allows adjustments like the number of gear stages, arm length, beam thickness, and more. After designing your desired claw, follow these steps: modify the object; customize settings; print and assemble the claw; and finally, consider modifying the single-stage servo positioning on the plate and driven gear, adjusting Gear_Play based on printer quality. Note that the servo mount is for a medium servo from a Sparkfun claw, which may need modification according to your design, and gears can be fixed using 3mm PLA filament. Videos of the claw in action can be found [here](http://www.youtube.com/watch?v=ribNNGnRoTQ) and [here](http://www.youtube.com/watch?v=Hxc98augCaA).
With this file you will be able to print Parametric Robot Claw with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Parametric Robot Claw.