Parallel Gripper for EEZYbotARM MK2
thingiverse
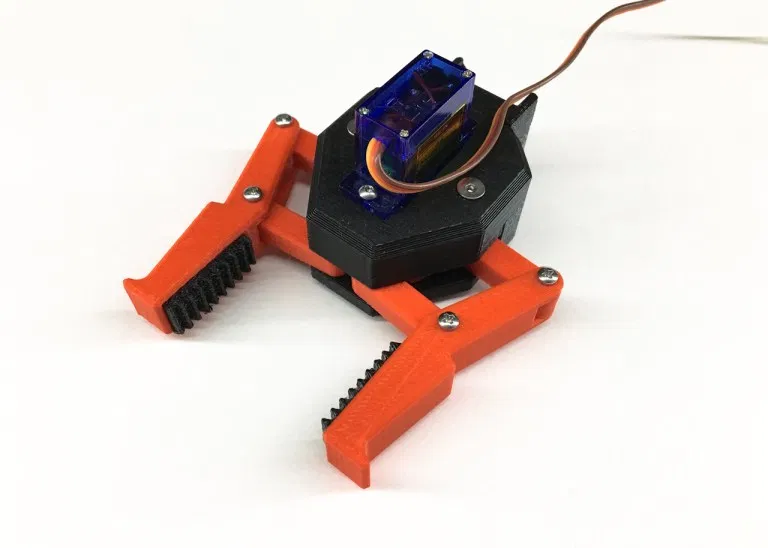
This is a reimagined version of my [Rov Manipulator (Parallel Gripper)](https://www.thingiverse.com/thing:4362236) customized to fit the [EEZYbotARM MK2](https://www.thingiverse.com/thing:1454048) robotic arm and controlled by a servo instead of a rotating shaft. Use an SG90 Servo. **Hardware needed** (See pictures for screw layout.) (4) 2-56 x 1/2" screws (2) 4-40" x 3/8" Button Head Screws (2) 4-40 x 1" Flat Head Screws Servo Mounting screws. Some of the parts must be oriented to print properly. See pictures for the layout I used. The fingers, forward hinges, and Pad need to be printed x 2. The finger pads were printed in a flexible filament for better grip but can be cut from rubber. See https://www.theneverendingprojectslist.com/raspberrypiprojects/raspberrypiroboticarm/ for more information.
With this file you will be able to print Parallel Gripper for EEZYbotARM MK2 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Parallel Gripper for EEZYbotARM MK2.