OZER Hexapod V-0.1 Open-Hardware, modular 3D printed robot using Raspberry Pi and Arduino
thingiverse
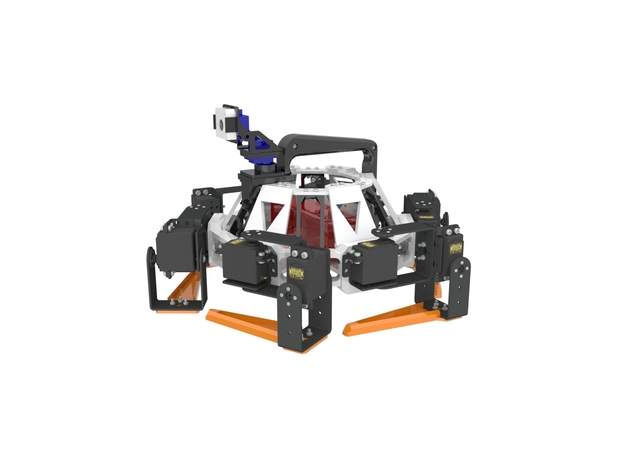
Human: https://www.youtube.com/watch?v=QOmyiqHHcBQ OZER is in progress to develop a fully functional hexapod for exploring functions on unstructured terrains. Key goals include developing a low-cost, easy-to-construct and assemble structure that allows reconfiguring of the platform for new uses. Servo and bracket models can be found at http://www.thingiverse.com/thing:1294905 and http://libremechanics.com/?q=node/32 In this version (V-0.1), the robot performs basic operations such as standing, walking; control is via SSH connection with a video feedback feed from the Raspberry Pi camera module. Basic walking sequences and turning are implemented deep within the Arduino microcontroller to simplify communication between the Raspberry Pi board and hardware. More information on the project can be found at: http://www.libremechanics.com/?q=node/38 Print Settings Printer Brand: Printer: RepRap Rafts: Supports: Resolution: 0.2 Infill: 100% Design Process The robot structure is made from 3D printed PLA and ABS, designed to withstand vibrations, falls, obstacle hits, and external forces with particular printing patterns and orientations. A high-drops test was conducted at 1.5 m with legs in standing position. Each leg module contains 1/6 of the total body assembly; its parts are connected using standard M3 screws and bolts. The hand grip assembly enables users to easily grab, transport, and deploy the robot. See more at: http://www.libremechanics.com/?q=node/38#sthash.OAV1eUMC.dpuf
With this file you will be able to print OZER Hexapod V-0.1 Open-Hardware, modular 3D printed robot using Raspberry Pi and Arduino with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on OZER Hexapod V-0.1 Open-Hardware, modular 3D printed robot using Raspberry Pi and Arduino.