Orca 0.4x to Megatronics conversion.
thingiverse
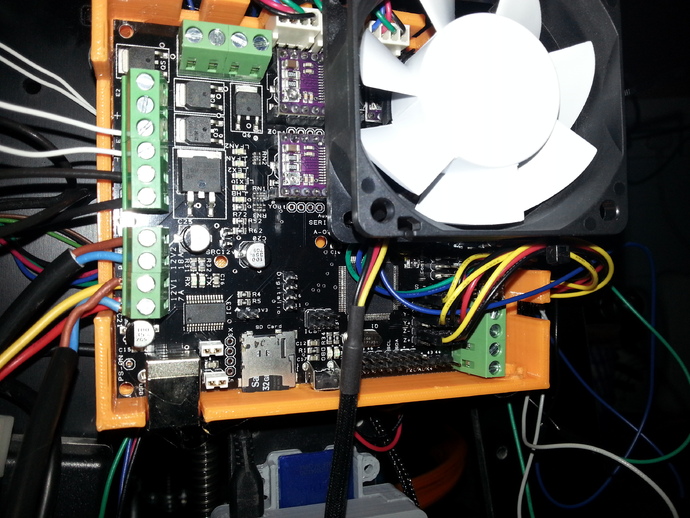
This user replaced their Gen6 Deluxe with a Megatronics v2 board and designed a case to mount it on an Orca. The DRV8825 stepper controllers support 32x microstepping, so steps/mm must be multiplied by four. End-stop wiring requires 3-wire connections instead of the original opto-connectors, which take up 2x5 pins and cannot be used. The original 4-pin motor connectors fit and work. Endstops need to be inverted in firmware, and MANUAL_HOME_POSITIONS must be set. The stepper reference voltage for SY42STH47-1684B motors is 0.84V, allowing a maximum current of 1.68 Amps. An update states that parts have been modified to fix the hinge issue. To assemble, use two M3 screws to secure the base to the hinged lid and place spacers behind the case for proper board positioning and cable routing.
With this file you will be able to print Orca 0.4x to Megatronics conversion. with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Orca 0.4x to Megatronics conversion..