Open Source Robotic Arm (Lite Arm i2)
thingiverse
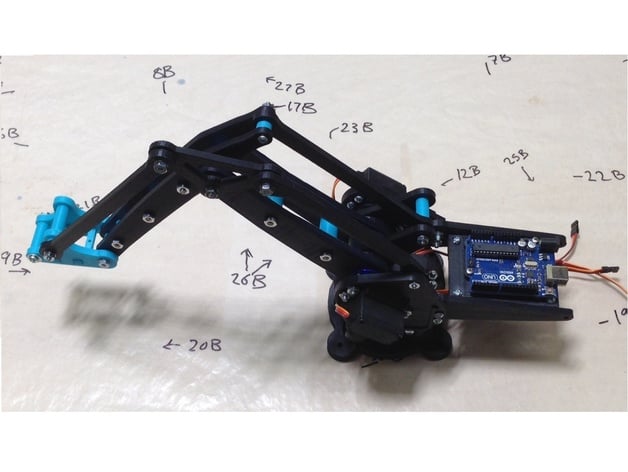
Here's a revised text rewritten from the original: Progress is being made, as shown in these links: https://www.youtube.com/watch?v=c-abxC1MJ2whttps://www.youtube.com/watch?v=qZBTVfS4Mxkhttps://www.youtube.com/watch?v=5G7_IZY3am0 Dave Beck is making significant strides. Updates from January 2nd, 2015 reflect changes made to forward and inverse kinematics. Alterations were required for parts 13B, 15B, and 18B; these have been renamed with a "C" appended, indicating modifications made. This ensures precise lengths, guaranteeing perfect alignment in linkage geometry. Electronic and software files will be added soon. A complete archive of 2014 files has been established to track progress and provide access to early versions. This team is committed to developing a versatile tool for 2015. An update from December 21st, 2014 outlines recent changes: 14B_and_17B 2.1.stl was added; its cleaner design led to replacement of 14B and 17B with 14B_and_17B 2.0.stl due to unstable files. Part 8B was replaced with 8B2.0 to address a discrepancy in symmetry related to part 7B. A second iteration, "Lite Arm Iteration 2," is an enhanced version of the first project (https://www.thingiverse.com/thing:407800). Contributors are thanked for their contributions. This includes my local team: Robert Cordtz -R&D, Chris Beck -R&D, Emmanuel Mota -R&D, and Lance Pierson -Structural Design & Chief Agitator (all from the Bay Area in California). Online contributors include David Beck /Dacb (electronics and software) from the Pacific Northwest and Billie Jamerson /Reichenstein7 (structural design and media) from the DC Metro. Gratitude is expressed to all who were not mentioned individually.
With this file you will be able to print Open Source Robotic Arm (Lite Arm i2) with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Open Source Robotic Arm (Lite Arm i2).