NinjaFlex / Flexible PLA Working robotic hand using 9g servos
thingiverse
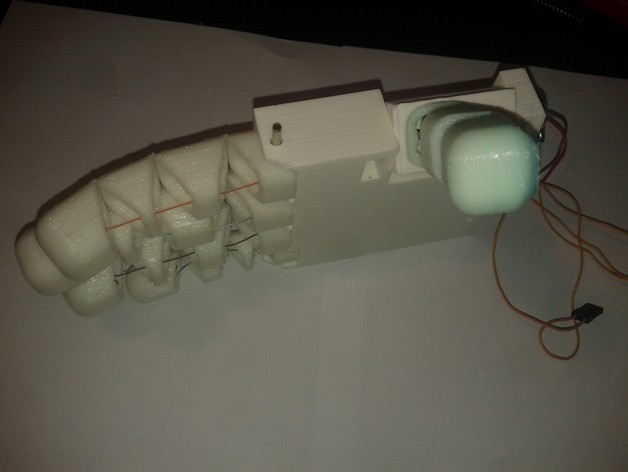
This is a working robotic hand. To create the fingers, use a flexible filament like NinjaFlex or TPU to allow for movement. The palm and thumb adapter should be printed with PLA/ABS plastic for stability. I used Flexible PLA from hobbyking for the palm. To make the fingers move, attach a cord (fishing line/thin wire) to the top of each finger and connect it to a 9g servo motor like tg9e. Each finger has its own dedicated servo motor, located on the back of the palm, so be careful when installing them in order to avoid blocking subsequent installations. A rod, 4mm in diameter, must be inserted through the front four fingers. The thumb is mounted using an adjustable adapter, allowing for adjustment of the angle at which it operates. Several M3, M4 and M8 bolts and nuts are required for assembly. Concerning electronics, many great tutorials on instructables.com explain how to make hands like this work with a PC or dedicated sensor glove. I designed this hand because most instructable projects require extensive assembly and don't last long, staying bent after a few bendings. In contrast, 3D printed parts always return to their original form, depending on the material used. Print Settings Printer: Turnigy Fabrikator Rafts: Doesn't Matter Supports: No Resolution: 0.2mm or more Infill: 25%+ Notes: The palm is designed to not need support on most standard printers, and fingers can be printed without support, but the inside will look ugly and the thumb adapter might require some support based on the orientation chosen for printing.
With this file you will be able to print NinjaFlex / Flexible PLA Working robotic hand using 9g servos with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on NinjaFlex / Flexible PLA Working robotic hand using 9g servos.