My tiny Deltabot
thingiverse
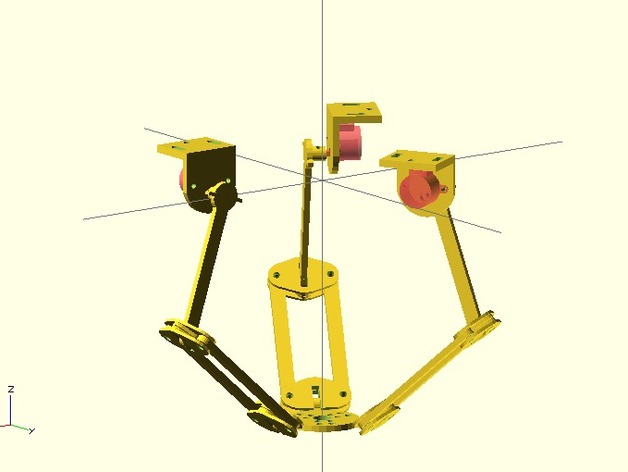
I created this solution to address a potential issue with JML31347's triangular joint design. Calculating the Point may be challenging due to this setup. To assemble the parts, follow these guidelines: Print the components as follows: - 6 x gelenk(); - 6 x aktuatorgelenk(); - 3 x oberarm(); - 6 x unterarm(); - 3 x by28_mount(); - 1 x actor(); Standard deltabot algorithms should be sufficient to calculate these parts. To assemble the robot, you'll need three 28byj-48 stepper motors. They may not be extremely fast but are compact. You will require a handful of M5x20 screws and stop nuts to mount the gelenk parts. Additionally, six 4x20mm rods are necessary for mounting the center arm part to the gelenk components. During my initial build, I constructed one arm yesterday, but it failed to impress with its limited range of motion. In light of this, I've decided to rework the design and use only one gelenk part instead of two separate ones, hoping this will simplify the assembly process.
With this file you will be able to print My tiny Deltabot with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on My tiny Deltabot.