Mecanum robotics platform for the Raspberry pi
thingiverse
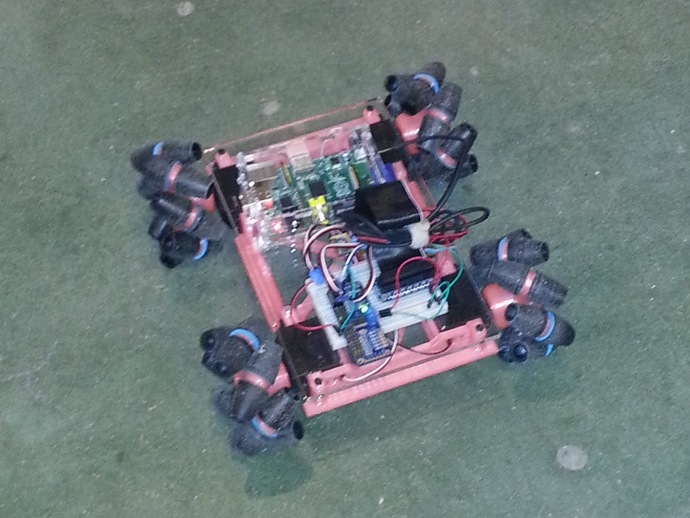
I've been working on a mecanum drive platform with my Raspberry Pi for remote control for the past couple months. The project will soon incorporate sensors. Check out this video of the platform in action: [http://www.youtube.com/watch?v=DRAkcRtQzG0](http://www.youtube.com/watch?v=DRAkcRtQzG0). The code related to the project can be found on my GitHub account at [https://github.com/destos/mecanum-drive/](https://github.com/destos/mecanum-drive/) and [https://github.com/destos/Adafruit-PWM-Servo-Driver-helpers](https://github.com/destos/Adafruit-PWM-Servo-Driver-helpers). If you're building a similar project, feel free to reach out for help. I've detailed the Bill of Materials (BOM) and general requirements below: * Raspberry Pi * Mini breakout breadboard with pi cobbler (e.g., [http://www.adafruit.com/products/914](http://www.adafruit.com/products/914)) * 4x Continuous servos ([http://www.adafruit.com/products/154](http://www.adafruit.com/products/154)) * Adafruit PWM controller ([http://www.adafruit.com/products/815](http://www.adafruit.com/products/815)) * Mini DC/DC Step-Down Converter ([http://www.adafruit.com/products/1065](http://www.adafruit.com/products/1065)) * 2x lithium polymer batteries ([http://www.adafruit.com/products/328](http://www.adafruit.com/products/328)) with JST female connectors and a LiPoly charger * Mecanum roller and hub hardware: 28x R3-2RS bearings (e.g., [http://www.vxb.com/page/bearings/PROD/kit715](http://www.vxb.com/page/bearings/PROD/kit715) or [http://www.thebigbearingstore.com/servlet/the-996/R3-dsh-2RS-R3-dsh-ZZ-Radial-Ball](http://www.thebigbearingstore.com/servlet/the-996/R3-dsh-2RS-R3-dsh-ZZ-Radial-Ball)), 56x 3/16" ID washers, 28x Socket cap screws (McMaster #91251A246), and 28x Lock nut, Hex Locknut (McMaster #90631A011) * 4x round servo arms (mine were laying around and came with other R/C servos; I'll provide a source when I find one) * Spray-on Plasti Dip for higher friction on the rollers Instructions: * Print 28 of mecanum_wheel_nut.STL and 28 of mecanum_wheel_bolt.STL (printable in ABS or PLA). Due to plastic shrinkage, print about 14 at a time with at least one shell for rigidity. * Print 2 of mecanum_base_v3_flipped.STL and 2 of mecanum_base_v3.STL (these will be the "hubs"). More instructions on assembly coming soon!
With this file you will be able to print Mecanum robotics platform for the Raspberry pi with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Mecanum robotics platform for the Raspberry pi.