Little Stomper
thingiverse
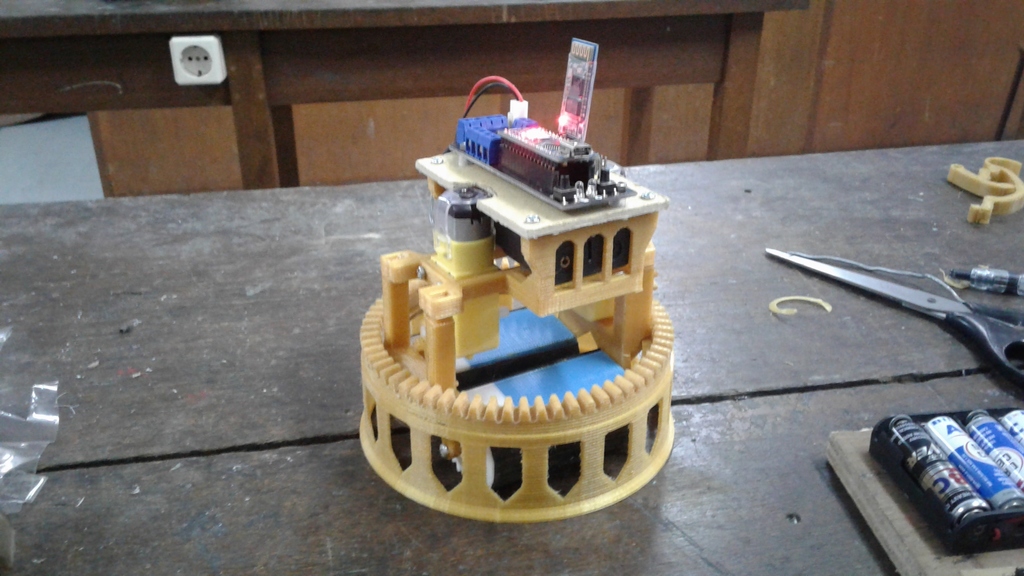
This is a robot platform that uses forward-rotate control via common yellow DC gear motors for each axis. Non-circular rollers allow the robot to stand alternately on the rollers or on the rotator ring, enabling pure forward motion or pure rotation at any given time. With rotary encoders on each motor (not yet implemented), the motion can be controlled even more precisely, such as every forward move ending with the rollers in an 'up' position. There is space for two 18650 battery holders that fit snugly inside. For the controller, I opted not to design a PCB holder since cutting and gluing cardboard is faster and cheaper than designing and printing one. Here, I'm using an Arduino Nano with a custom carrier PCB and Bluetooth remote control. The Arduino Uno holder and top frame with ultrasonic sensor holder have not been tested yet. Gear ratios are as follows: * Rollers: 8 : 15 * Rotator: 8 : 65 Watch the video here: https://youtu.be/Z3O_GmBhaHg Screws needed include all M3 size, with lengths of: * 30mm (+ nut) x4 for the motors * 10mm x 9 for attaching ring gear to the ring, middle gear axle, and anything to the top frame * 20mm x4 for roller axles Screw holes are as follows: * Motor holder: no thread, 3 mm diameter * Roller holder and gear holder: threaded with an M3 size hand tap * Middle gear and roller: no thread, 3 mm * Ring gear: threaded with M3 * Ring: no thread, 3 mm * Top frame: threaded with M3 The curved part of the rollers is covered with a rubber sheet (bicycle inner tire) for better traction. Note: The two-color roller was due to filament change mid-print since I ran out of filaments.
With this file you will be able to print Little Stomper with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Little Stomper.