Langhorne - differential drive robotic base
thingiverse
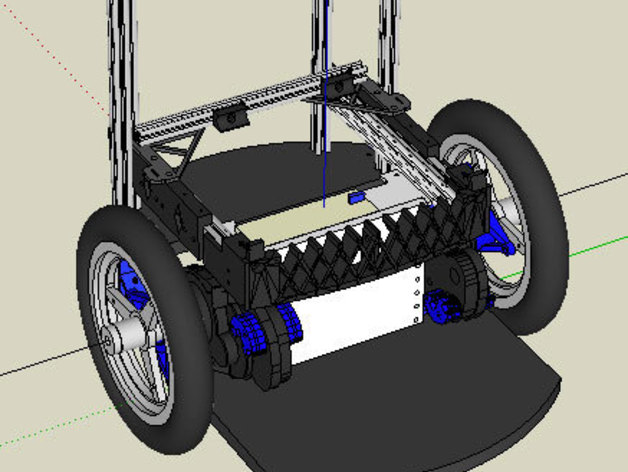
Owing to some issues with the dae file preview in the second image of the gallery, it seems that the file isn't compatible with Thingiverse Universe. However, a message has been sent to their support group and necessary adjustments will be made. The project involves a low-cost, medium-duty differential drive robotic base which features a Kinect camera, modified Power Wheels gearboxes with quadrature encoders, 12.5" wheels and tires from an electric scooter, a Pololou h-bridge motor controller, a Robogaia encoder counter, a Mean Well DC-DC power source for the Kinect, a Pololu IMU for localization assistance, an Arduino Mega, and a Dell Inspiron laptop running ROS (the open-source robot operating system). The total cost (excluding the laptop) was under $700. Initially conceived as a 50-100 pound indoor load carrier, the project is currently focused on integrating the ROS OS with the physical unit to enable autonomous operation and future plans include adding robotic arms. Detailed parts list (excluding miscellaneous nuts and bolts) can be found at http://thefabfor.com/langhorne/. Instructions for modifying power wheels gearbox drives to include quadrature encoders are available at http://thefabfor.com/quadrature-encoder-for-power-wheels-gearbox/. Upcoming instructions will cover Kinect sensor stabilization mount, drivetrain assembly, laptop mount assembly, and ROS OS integration. Updates can be found on the same website. Feel free to comment with specific suggestions to help prioritize tasks.
With this file you will be able to print Langhorne - differential drive robotic base with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Langhorne - differential drive robotic base.