KL-20 octoped robot spider
thingiverse
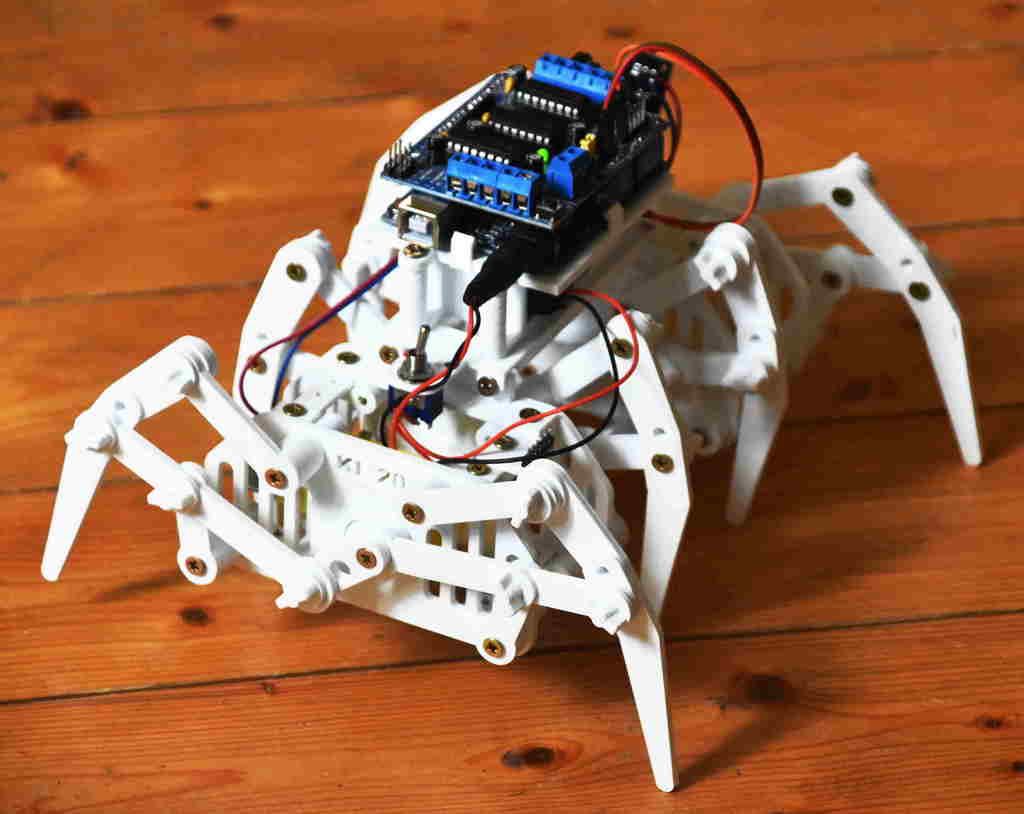
KlannBot KL-20 is based on the Klann mechanism, a plan designed to mimic an animal's leg movement and replace wheels. The mechanism consists of a "leg" that comes into contact with the ground, a crank, two cam followers, and two roller bearings, all connected by pivot joints. Eight such systems ensure this robot's mobility.
Download Model from thingiverse
With this file you will be able to print KL-20 octoped robot spider with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on KL-20 octoped robot spider.