KINEO Quadruped
thingiverse
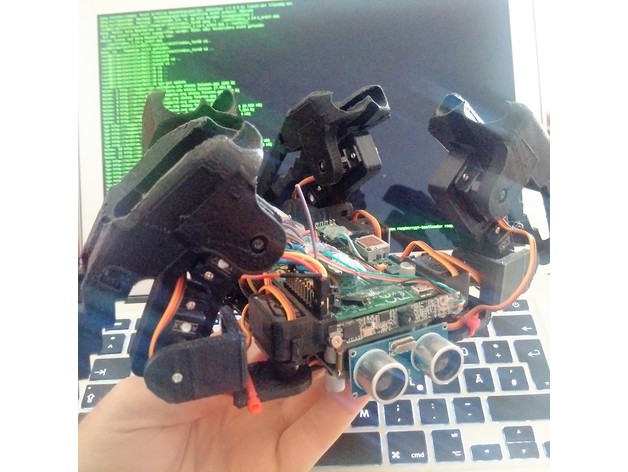
KINEO ist ein Robot Projekt aus Deutschland. Die Servos werden mit Hilfe eines Arduino Uno angesteuert und per I2C-Verbindung zu einem Raspberry Pi kommuniziert, dessen Model A, B oder das spätere Modell B+ verwendet wird. Der Zweck besteht darin, eine kostengünstige Roboterplattform mit unendlichen Möglichkeiten zu entwickeln. Diese Plattform wird von acht AA-Akkus angetrieben -http://youtu.be/wFWkaVhQbp4. In KINEO ist ein deutsches Robot Projekt enthalten, Die Servos werden durch Arduino Uno angesteuert, welches mit I2C und Raspberry Pi kommuniziert. Der Ziel ist eine günstige Robot Plattform zu entwickeln mit unbegrenzten Möglichkeiten. 1. Ziel: Entwicklungen einer kostengünstigen Roboterplattform. Arduino code kommt bald…. Intruction: Die Einstellungen in dem Drucker betragen: Auflösung .3mm 33% Ausgefüllt 2 Schalen Abmessungen der Servos: h = 24,3 mm l = 23,8mm t =11.5 mm wie im G12AM oder im G12DM Die 4 Motoren müssen verändert werden damit sich das Richtung in die richtige Bewegung richtig einstellte . Sie können den Anleitungsbeschrieb unter folgendem Link herunterladen youtube.com/watch?v=_bkZcOS32Uc , dies macht es leicht und schön. Beginnend mit dem Vorne Links fahren Sie sich von links gegen den Uhrzeigersinn zu Vorn rechts bis nach Rücken links.
With this file you will be able to print KINEO Quadruped with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on KINEO Quadruped.