Hexapod "Gilbert300" : Arduino Mega 2560 based 3d printed 6 legs robot
thingiverse
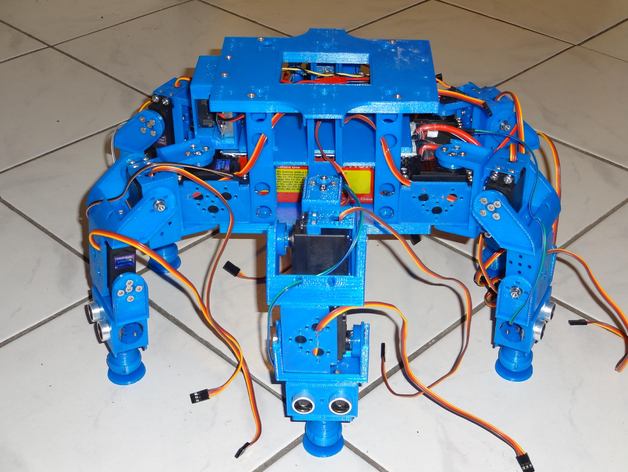
I present to you the latest iteration of my three-dimensionally printed PLA hexapod: Gilbert300. Witness its initial locomotion at http://www.dailymotion.com/video/x32snjf_2015-08-23-gilbert300-first-walk_tech. Gilbert's framework is composed of: Two main panels, titled "body-V2" and "body-V2-upper", which form the foundation. Six sets of "track-v2" components that make up each limb. One "ubec_fan_switch_support" for the vital systems. A single deck that supports an Arduino MEGA 2560. Each hexapod leg comprises: Three servo mount brackets designated as "MG996R Bracket Servo". Two forks marked as "MG996R Fork Servo". One specially designed "MG996R 45 Fork Servo". One unit of a "US sensor bracket" for enhanced sensitivity. One component known as the "rotule switch with foot". Six parametric "flange parametric" pieces to hold it all together.
With this file you will be able to print Hexapod "Gilbert300" : Arduino Mega 2560 based 3d printed 6 legs robot with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Hexapod "Gilbert300" : Arduino Mega 2560 based 3d printed 6 legs robot.