Hand prosthesis with thumb adjustment mechanism
thingiverse
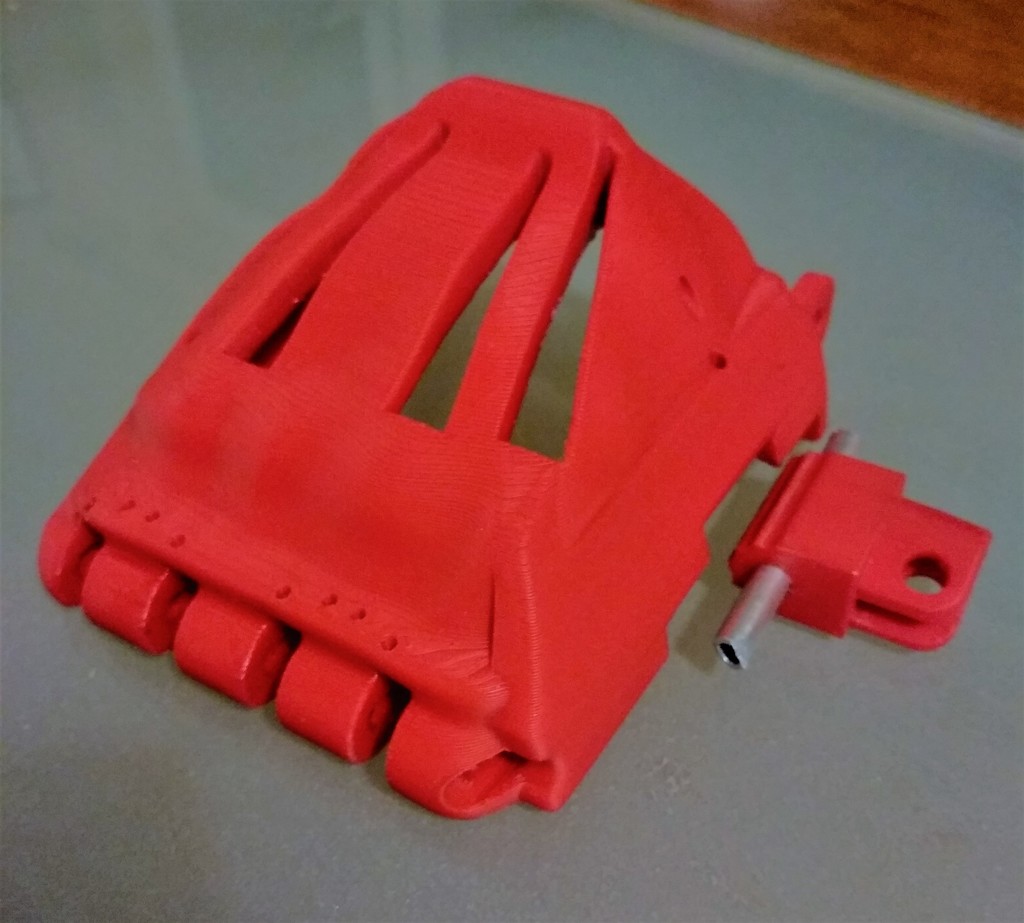
As part of my thesis research, I designed a mechanical hand prosthesis that utilizes 3D printing technology to change the thumb's position while bending the finger. This innovative modification aims to improve the grip maneuver in low-cost prostheses by enabling the setting of the thumb position. Using Autodesk Inventor Professional 2017, I developed the project based on the Cyborg Beast design from Thingiverse (https://www.thingiverse.com/thing:261462). The proposed concept for the hand prosthesis includes a ratchet mechanism that allows the thumb to change positions in five different variants. A critical component of this design is the aluminum tube, which serves as a mandrel with an axial opening. This tube passes through the main element of movement, ensuring smooth operation. A hole was drilled at the connection point between the pipe and the main element to route the thumb-pulling line to the bent position. To assemble the main movement element with the mandrel, I used cyano-acrylic glue to secure them together. Next, I led the line through prepared holes in the main movement element and the closer and further sticks, respectively. To facilitate assembly, I cut out two fragments from the mid-handle design, making it easier to integrate the main movement element with the mandrel. The hand prosthesis is designed to be efficient, reliable, and user-friendly, offering a significant improvement over existing low-cost prostheses. By enabling the setting of the thumb position, this innovative design enhances the grip maneuver, providing users with greater control and dexterity.
With this file you will be able to print Hand prosthesis with thumb adjustment mechanism with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Hand prosthesis with thumb adjustment mechanism.