Hand and Arm
thingiverse
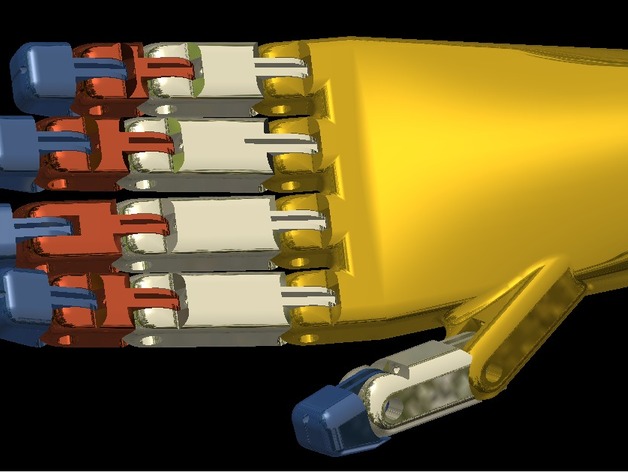
This hand is engineered for use as a robotics platform or remodeled for application as a prosthetic device. Design features include a rigid yet anatomically precise arm, elbow and hand. The pads of the fingers are flat to accommodate touch sensation additions. The forearm is designed with mounting space for stepper motors and batteries on its internal surface. Tendon guides can be easily threaded using thin wire. Pass the wire through the guides so it may be super glued to 100 lb carbon fiber. Fishing line of this description works well. Once the glue is dry, simply pull the wire and the line will thread itself. Superglue the line at the end of the finger tips. File and sand each part for complete freedom and flexibility before supergluing the pins for joints. The clearance between moving parts is .020 inch, so prints have less interference and require less sculpting during assembly. All .ipt files have been uploaded for download. Users not familiar with Autodesk Inventor can convert files using internet-based file converters. Questions may be directed to tridenttackle2013@gmail.com for assistance. Visit Shop Class at https://sites.google.com/site/shopclasscurriculum/?pageId=108179657729010009612 for additional information and resources. Print Settings: Printer Brand: MakerBot Printer: MakerBot Replicator (5th Generation) Rafts: Yes Supports: Yes Resolution: .025 Infill: 30
With this file you will be able to print Hand and Arm with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Hand and Arm.