Grasp 1.0
thingiverse
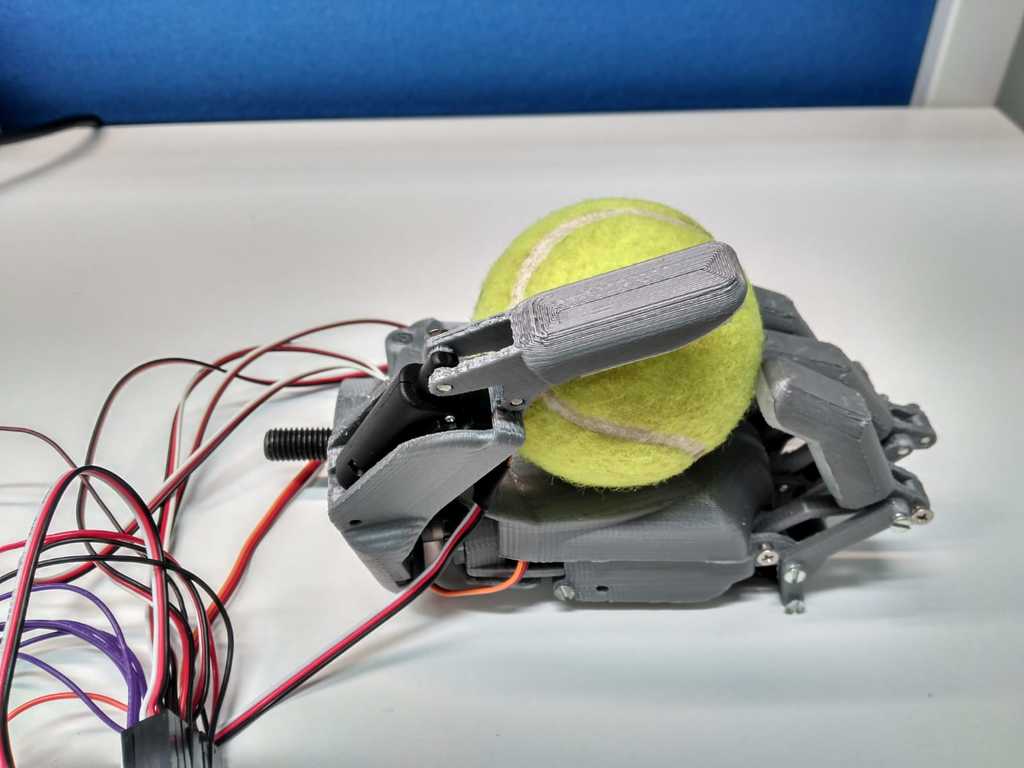
This is the final iteration of the project with six degrees of freedom. Printed parts made from PLA: 1. Palm component 2. Bottom cover piece 3. Top cover part 4. Thumb core unit 5. Thumb distal phalanx 6. Four finger joint pieces 7. Four distal phalanx units 8. Four proximal phalanx components Finger covers can be created with silicone or rubber using molds available for purchase. A minimum of the following is required: 1. Finger mold 1 2. Finger mold 2 3. Thumb mold 1 4. Thumb mold 2 Additionally, the following electronics and hardware are needed: 1. Arduino Nano microcontroller board 5. Actuonix PQ12R linear actuators 1. Micro servo MG90S 6V power supply unit 11-10 M3 allen screws, each 10 mm long 12-12 M3 allen screws, each 16 mm long 13-1 M3 allen screw, 20 mm long 14-4 M2 blade screws, each 8 mm long 15-2 M4 star head screws 16-1 M10 allens screw, 30 mm long 17-1 MG90S servo mounting screw
With this file you will be able to print Grasp 1.0 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Grasp 1.0.