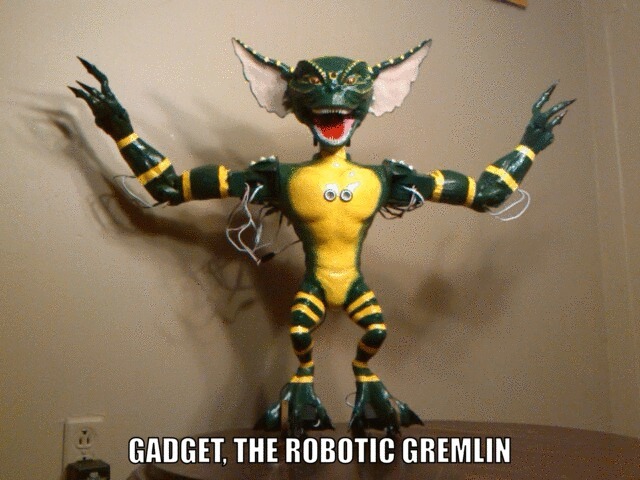
GADGET the robotic GREMLIN
thingiverse
This is Gizmo, the robotic Imp. Since I first saw the Imps movie in 1984, I've wanted an Imp. The problem is, they are mythical creatures. It came down to 3 "C"s... * Catch (chances of success 0.0005%) How many Yetis, Leprechauns & Fairies are caught? * Conjure (chances of success 10%) Lifetime study of Dark arts & unsavoury sacrifices required... * Create (chances of success 75%) Design, 3D print, assemble and program I chose the Create option (even though computers and I don't get along) Thanks to the EZ-B v4 from EZ-ROBOTS, I believe I can bring my creation to life. My hopes are that he will be joystick controlled, and eventually be an A.I. autonomous companion. The ezrobot camera has 640x480 resolution at 20fps with no latency. It is capable of color tracking, objection recognition, facial recognition and more. The ez-bv4 boasts 200MHz of 32-bit processing (ARM Cortex-M3 & Microchip PIC32), 5 volt tolerant I/O, energy efficient digital switching power supply, Wi-Fi connectivity with security, embedded web server, amplified digital audio with speaker, 3 I²C ports, 3 x UARTs, 24 multi-use servo/digital/serial ports, 73 servos (Dynamixel & PWM), 8 analog ports, and integrated video. Ultra sonic sensor lets him "see" obstacles up to 6ft away. Additional parts required for this project are: *1 EZ-B v4.2 developer kit (contents: 1 ezbv4, plug in bracket, camera, ultrasonic sensor, 4 HDD servos, 2 continous servos, servo extension cables, battery pack...) * 4 more HDD servos * 4 micro HDD servos * 1 tower pro sg90 servo (for jaw) * camera extension cable * 10 more servo extension cables (for arms) * 12 x drywall screws (8 to assemble torso & 4 to attach stabilizers) * 6 bearings (608, for inline feet support and stabilizers) * several tubes of crazy glue (Gel is highly recommended) * unbelievable amount of patience Special Thanks to: 3D modeller Hoinz for the original model @ https://www.thingiverse.com/thing:258879 and to fellow Pinshaper richard swika, whose comment on my Krampus project pointed me towards the EZ-ROBOT system and made all this possible. Special notes: * You must 3D print 2 of the wheel models & glue on a rubber band strip. DO NOT STRETCH the rubber band while gluing in place. You want the rubber to be "spongey" for best traction. * Use servo horns provided with servos (shoulders, elbows, upper biceps...) * Videos first sign of life, head and jaw, joystick controlled @ https://www.youtube.com/watch?v=alnPy5QHD4Y&list=PLyihtXhIBu9PD7JindfB_JMCtx-NZL8iq&index=7 servo test @ https://www.youtube.com/watch?v=CduttaEIQVY&list=PLyihtXhIBu9PD7JindfB_JMCtx-NZL8iq&index=8 Assembly video @ https://www.youtube.com/watch?v=EXWklJNU-Dc&list=PLyihtXhIBu9PD7JindfB_JMCtx-NZL8iq&index=9&t=1s
With this file you will be able to print GADGET the robotic GREMLIN with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on GADGET the robotic GREMLIN.